Programowalny układ zasilający dla elektroniki medycznej
| Prezentacje firmowe ArtykułyUrządzenia elektroniki medycznej, jak na przykład aplikacje do obrazowania w 3D, nigdy nie cierpiały na nadmiar mocy obliczeniowej procesorów tworzących na podstawie strumieni danych płynących z czujników trójwymiarowe zobrazowanie pozwalające na oglądanie przekrojów ludzkiego ciała. Jeszcze 10 lat temu takie systemy obróbki danych zajmowały kilkanaście metrów sześciennych miejsca w obudowie, dzisiaj nierzadko są w wersji przenośnej i są instalowane w salach szpitalnych obok łóżek.
Projektowanie przenośnych systemów obrazowania medycznego z wykorzystaniem najnowszych procesorów jest dużym wyzwaniem, gdyż trzeba dla dużej wydajności zapewnić niezbędne zasilanie. Dawniej nie było to większym problemem, ponieważ układy logiczne były zasilane napięciem 5V, dyski twarde i większość urządzeń peryferyjnych wymagały z kolei napięcia 12V, a reszta systemu komputerowego zwykle była podłączana do jednego z wymienionych napięć.
Czasem tylko wymagane było dodatkowe napięcie o ujemnej polaryzacji w stosunku do masy. Niestety okres, kiedy takie dwunapięciowe zasilanie było wystarczające, już dawno minął. Obecnie inteligentne i wydajne układy logiczne odpowiedzialne za przetwarzanie i prezentację danych na ekranie zawierają zwykle 32-bitowy procesor, układy FPGA i ASIC i całość ta zasilana jest niskimi napięciami poniżej 1V, pozwalającymi utrzymać w ryzach pobór mocy.
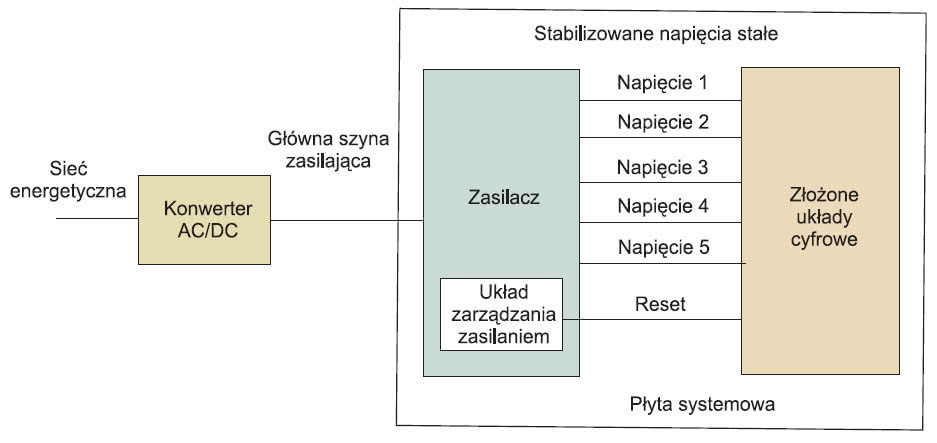
Inne napięcie zasilania jest wymagane przez procesor, inne przez układy ASIC odpowiadające za funkcjonalność systemu, jeszcze inne wartości dotyczą pamięci, interfejsów komunikacyjnych. W rezultacie w typowym systemie konieczne jest zapewnienie około 12 różnych wartości napięcia zasilającego, nierzadko o programowanej cyfrowo wartości po to, aby zapewnić elastyczność konfiguracji bloków komputera. Budowa systemu zasilającego spełniającego te wymagania wymaga od konstruktora wiele uwagi i zaangażowania, żeby spełnić wszystkie wymagania i warunki związane z jakością stabilizacji.
Jak uzyskać prostą konstrukcję?
Optymalnym rozwiązaniem systemu zasilającego dla systemu komputerowego w dzisiejszych czasach wydaje się wykorzystanie specjalizowanego układu scalonego typu SoC, zawierającego szereg sterowników do realizacji kilku niezależnych zasilaczy, sprzężonych wspólnym systemem zarządzania i połączonych za pomocą szyny komunikacyjnej. Taka uniwersalna konstrukcja, której gwarancją jest programowalny układ SoC, jest w stanie spełnić dokładnie wymagania w każdym konkretnym przypadku.
Nowe systemy elektroniki medycznej mogą wykorzystać możliwości wiążące się z tą architekturą do blokowania zasilania dla niewykorzystywanych sekcji i peryferii sprzętowych, zapewniając w ten sposób lepszą efektywność energetyczną urządzenia i wydłużając czas pracy bez konieczności ładowania akumulatorów. Programowalny układ zasilający jest też optymalnym rozwiązaniem dla systemu, w którym trzeba zapewnić dużą wydajność przetwarzania w tylko określonym czasie, a następnie utrzymywać minimalny pobór mocy.
Zdolność do dynamicznej rekonfiguracji, a więc zmiany parametrów zasilania w biegu podczas pracy systemu, jest kolejną funkcjonalnością, której dzisiaj wymaga się od systemów zasilających sprzęt przetwarzania danych. To samo dotyczy możliwości reagowania na zmieniające się warunki obciążenia i stany nieustalone w linii zasilającej, które w większości tradycyjnych systemów nie zawsze są filtrowane i tolerowane oraz nierzadko przyczyniają się do destabilizacji pracy urządzenia.
 |
Innymi słowy projektowanie systemu zasilającego jest dzisiaj nieporównywalnie bardziej złożone niż kiedyś i zajmuje więcej uwagi konstruktorom. Oznacza to konieczność zwracania uwagi na czynniki, które do niedawna nie były istotne lub realizowane w inny, na przykład programowy sposób. Dotyczy to też różnorodności trybów pracy. Nierzadko układy VLSI do systemów komputerowych pracują w 6 trybach różniących się m.in. napięciem zasilania.
Co więcej, zamiast dotychczasowej tolerancji 5% dzisiaj wymaga się 1% dokładności stabilizacji: na przykład w trybie 1 napięcie ma być 1,05V ±1%, a w trybie 2 już 0,95V z tą samą tolerancją. Warto zauważyć, że taki wysoki stopień stabilizacji napięć wyjściowych musi zostać zapewniony w każdych warunkach pracy, a więc na przykład w pełnym zakresie temperatur pracy urządzenia oraz dla wszystkich kombinacji napięć wejściowych i obciążenia.
Elastyczność, czyli prostsze projektowanie
Programowalny układ SoC wydaje się rozwiązaniem, które w najbardziej optymalny sposób wpasowuje się w powyższe rozważania i ma szereg zalet w porównaniu do rozwiązań dyskretnych bazujących na kaskadowo połączonych klasycznych stabilizatorach. Im mniejsze wyjściowe napięcia zasilające, tym liczba dostępnych układów scalonych realizujących taką funkcję bez konieczności zmian i modyfikacji oryginalnych układów aplikacyjnych dostarczanych przez producenta jest mniejsza.
W praktyce rzadko udaje się dobrać scalone stabilizatory impulsowe, które są w stanie bez dołączania elementów zewnętrznych innych poza dławikiem dostarczyć wymaganych napięć i mocy. W ten sposób rozwiązanie systemów zasilania nierzadko zajmuje dużo miejsca na płytce drukowanej, a obwody odpowiadające za tę funkcję mają duży udział w kosztach niezbędnych komponentów elektronicznych. Programowalny układ SoC ma jeszcze jedną ważną przewagę nad rozwiązaniami tradycyjnymi, która wynika z prostoty projektowania.
Dostępność specjalizowanych programów narzędziowych dla tej grupy układów scalonych nie tylko pozwala szybko zaprojektować rozbudowany system zasilający, ale także zapewnić połączenie sterownika z oprogramowaniem i interfejsem użytkownika po to, aby z poziomu oprogramowania i aplikacji móc dokonywać zmian i korekcji parametrów napięć w poszczególnych gałęziach.
Przykład rozwiązania
Układy scalone firmy Exar XRP77xx to przykład produktów o wymienianych powyżej właściwościach, które mogą służyć do budowy 5-wyjściowego programowalnego systemu zasilającego. W strukturze znajdują się cztery programowalne sterowniki przetwornicy impulsowej wraz z układem drivera zdolnym do bezpośredniego sterowania zewnętrznym tranzystorem FET typu high-side (umieszczonym w górnej, dodatniej szynie zasilającej) lub low-side (pracującym w dolnej szynie zasilającej o ujemnym potencjale). Każdy taki blok przetwornicy może posłużyć do budowy konwertera o wydajności od 5A do 15A.
Tranzystory mocy MOSFET plus kilka dyskretnych elementów pasywnych to jedyne elementy zewnętrzne wymagane do budowy takiego impulsowego konwertera DC-DC. Dodatkowo XRP77xx zawiera konfigurowalny, liniowy stabilizator LDO (o niskim spadku napięcia) i wydajności 100mA, który może dostarczać piątego niezależnego napięcia wyjściowego o wartości 3,3V lub 5V. Dodatkowy konfigurowalny stabilizator LDO przeznaczony jest do specjalnych zastosowań, takich jak na przykład podtrzymywanie napięcia zasilającego dla podzespołów specjalnych wymagających ciągłego zasilania, nawet jeśli reszta jest wyłączona.
Co ciekawe, XRP77xx oferuje możliwość kształtowania charakterystyk włączania i wyłączania poszczególnych bloków zasilających, pozwalając ustalać szybkość narastania napięcia na wyjściu każdego z czterech kanałów oraz na definiowanie zależności czasowych między napięciami. Ta ostatnia właściwość daje projektantowi możliwość zapewnienia, że określone napięcia pojawią się na wyjściach przed lub po innych, co ma kluczowe znaczenie w zasilaniu złożonych układów cyfrowych bazujących na FPGA, procesorach, ASIC, SoC i ASSP.
XRP77xx realizuje oczywiście wszystkie niezbędne funkcje związane z zarządzaniem i kontrolą napięć zasilających, takie jak kontrola zbyt niskich wartości napięcia zasilania, prawidłowości napięć wyjściowych, zabezpieczenie przed zbyt wysoką temperaturą i wykrywanie błędów. Wszystkie obwody kontrolne są konfigurowalne, a ich status może być nadzorowany z poziomu procesora sterującego działaniem całości urządzenia za pośrednictwem łącza I2C. Do programowania działania producent przygotował specjalny program o nazwie Power Architect pracujący na pececie, za pomocą którego można przygotować dane konfiguracyjne na dwa różne sposoby:
- automatyczny generator BOM zawarty w Power Architect tworzy kompletną listę połączeń, wraz z oznaczeniami i wskazówkami producentów na temat ich aplikacji, wymaganą do stworzenia bloku zasilania PowerXR
- parametry konfiguracyjne ustawione w programie są przetwarzane na dane dla rejestrów układu XRP77xx. Pozwala to na automatyczne ustawienie pracy za pomocą dodatkowej pamięci PROM przechowującej te dane lub na przesłanie ich przez I2C podczas startu.
Podsumowanie
Programowalne sterowniki systemu zasilającego z rodziny PowerXR firmy Exar przeznaczone są do stworzenia za ich pomocą złożonego układu zasilającego, dostarczającego kilku niezależnych napięć wyjściowych z jednego napięcia wejściowego, z możliwością programowania i modyfikacji działania bez konieczności dokonywania zmian na płaszczyźnie sprzętowej układu.
Jest on też w stanie uwolnić konstruktora od wielu problemów pojawiających się najczęściej w trakcie dłuższej eksploatacji, pozwalając dokonywać ulepszenia poprzez ściągnięcie nowego kodu. Zalety korzystania z programowalnego układu sterownika zasilającego są takie same, jak dla innych elementów programowalnych w układzie, z tym że tym razem ustala się relacje dotyczące konwersji energii zasilającej, a nie zależności logiczne.
Farnell
www.farnell.com/pl
Artykuł firmowy Artykuł udostępniony przez Farnell we współpracy z firmą Exar.