Zapotrzebowanie na te jednostki nieustannie rośnie, a wraz ze zwiększającymi się wymaganiami co do większej sprawności i przyjazności dla środowiska naturalnego oraz większej niezawodności działania, ich rozwój zaczyna także napędzać technologia, w której sterowanie zasilaczem bezprzerwowym realizowane jest na drodze cyfrowej.
Rysunek 1.
UPS-y znalazły też swoją niszę w aplikacjach zasilanych ze źródeł energii alternatywnej, gdzie pełnią rolę inwerterów przekształcających stałe napięcie z akumulatora gromadzącego na czyste i niezawodne napięcie przemienne o parametrach zgodnych z wymaganiami sieci energetycznej.
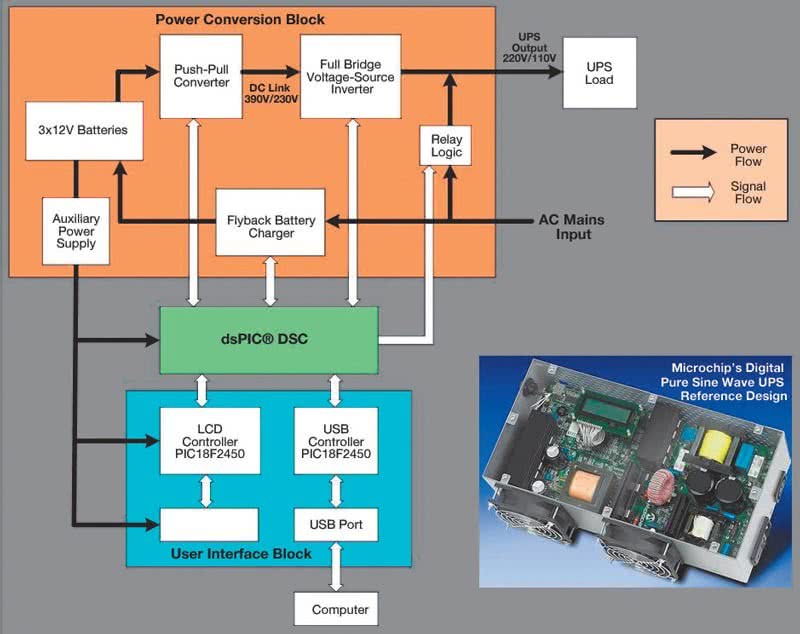
Microchip opracował projekt referencyjny zasilacza UPS o mocy wyjściowej 1 kVA, którego celem jest przyspieszenie projektowania tych urządzeń i obniżenie kosztów tak, aby możliwe było sprostanie współczesnym potrzebom rynku. Na rysunku 1 pokazany został schemat blokowy referencyjnego projektu zasilacza typu offline, z zaznaczeniem dróg transmisji sygnałów i konwersji mocy.
Bloki funkcjonalne systemu
Projekt układu zawiera trzy główne stopnie realizujące konwersję energii elektrycznej: konwerter DC-DC push-pull, inwerter pełnomostkowy oraz impulsową ładowarkę akumulatora w postaci przetwornicy zaporowej. Dodatkowym elementem jest moduł wyświetlacza LCD oraz port USB zapewniający możliwość podłączenia do komputera i realizujący zdalne monitorowanie i zarządzanie pracą. Sercem układu jest dsPIC Digital Signal Controller (DSC), który dzięki rozbudowanym układom peryferyjnym (szybkie obwody PWM, szybki przetwornik A/C oraz komparatory analogowe) pełni funkcję sterownika i serca systemu UPS. Kontroluje on wszystkie krytyczne operacje zasilacza i jest odpowiedzialny za działanie interfejsu użytkownika.
Zasada działania
W czasie, gdy napięcie sieci energetycznej jest dostępne, system ładuje akumulator do momentu, aż osiągnie on stan pełnego naładowania, a następnie utrzymuje go w tym stanie, oczekując na chwilę zaniku napięcia sieci (awarię). Do ładowania wykorzystywana jest przetwornica zaporowa dostarczająca stałego prądu wyjściowego. Wartość prądu ładowania zależy od stanu akumulatora, a nadzorujący ten proces kontroler dsPIC realizuje ten proces w sposób inteligentny.
W trakcie tego procesu pełnomostkowy inwerter pracuje jako prostownik i wykorzystuje znajdujące się w układzie diody i przełączniki mocy. Po zaniku napięcia sieci, system załącza inwerter, a czas przełączenia w tryb pracy UPS nie przekracza 10ms. Wyjście UPS-a jest przełączane z zacisków sieci na wyjście inwertera. Konwerter push-pull podwyższa napięcie akumulatora do wartości 390VDC, które następnie jest zamieniane na falę sinusoidalną 220V/50Hz za pomocą inwertera pełnomostkowego i filtru wyjściowego LC.
Część software’owa
Funkcje sterownika urządzenia zostały pogrupowane w następujących kategoriach:
- algorytmy konwersji energii zasilającej
- przełączanie między trybem UPS a ładowaniem akumulatora
- funkcje zabezpieczające
- funkcje obliczające wartości napięć i prądów RMS
- funkcje wolnego startu
- funkcje obsługi LCD i USB.
Działanie oprogramowania uwzględnia priorytet realizowanych zadań. Te najważniejsze oparte zostały na przerwaniach, dzięki czemu ich wykonanie nie jest wstrzymywane.
Przełączanie UPS praca normalna
Rysunek 2.
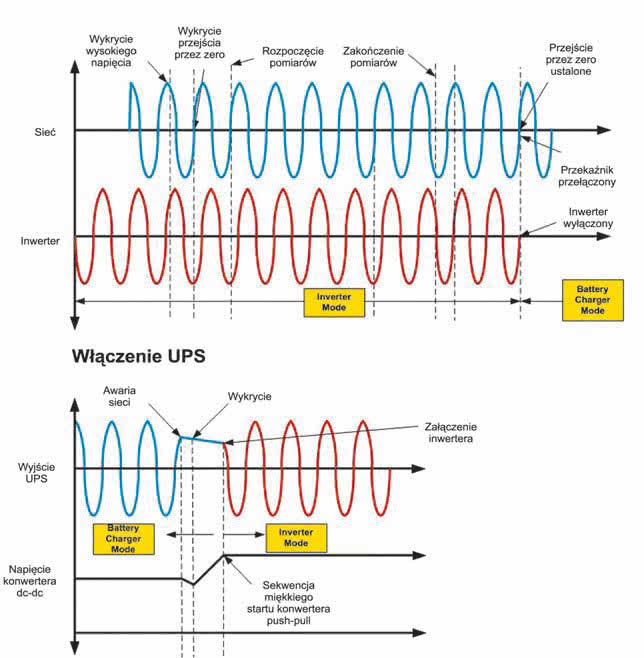
Podczas pracy urządzenia jako UPS, gdy nie ma napięcia sieci zasilającej, system monitoruje zaciski po to, aby gdy zasilanie powróci, przejść ponownie do pracy normalnej. Po wykryciu wysokiego napięcia na wejściu trwającego przez minimum 5ms, system czeka na moment, gdy napięcie zmieni znak, przechodząc przez zero, co świadczy o pojawieniu się zasilania napięciem przemiennym. W następnym kroku napięcie sieci jest próbkowane przez jeden okres, a dane na temat chwilowych wartości zostają zapisane w pamięci sterownika, co pozwala je potem wykorzystać jako odniesienie do detekcji zaników.
Kolejny krok to synchronizacja. Program porównuje aktualne chwilowe napięcie sieci z zapamiętanymi wartościami próbek i uznaje, że jeśli różnica nie przekracza ±20V w czasie 8ms, to znaczy, że napięcie sieci jest obecne. Następnie wywołuje przełączenie inwertera do pierwotnego stanu, w którym bateria jest ładowana, a wyjście zasilane z sieci.
Gdy przemienne napięcie wyjściowe z inwertera ma inną fazę od napięcia sieci, przed przełączeniem zmieniana jest częstotliwość pracy inwertera do momentu, aż oba sygnały będą w tym samym momencie przechodzić przez zero. Dopiero wówczas następuje przełączenie, co zapewnia wykonanie tego zadania w najkrótszym czasie. Przełączenie uwzględnia też kilkumilisekundowy czas zadziałania przekaźnika.
Przełączanie praca normalna UPS
Gdy napięcie sieci jest obecne, oprogramowanie sterownika stale porównuje bieżącą wartość chwilową sinusoidy sieci z zapamiętanymi próbkami z wcześniejszych pomiarów. Jeśli różnica pomiędzy wartością zmierzoną a oczekiwaną przekroczy ±20V, sterownik rozpoczyna ciągły pomiar napięcia, przygotowując się do sytuacji alarmowej. Gdy stan ten trwa dłużej niż 1ms, program uznaje, że napięcie sieci zaniknęło i rozpoczyna przełączenie w stan pracy jako UPS. Wywołuje to rozruch konwertera push-pull z trybem soft -start i uruchomienie falownika. Opisana sekwencja działań została zilustrowana na rysunku 2.
Praca z obciążeniem pojemnościowym
Mimo że wiele sprzętu komputerowego zawiera już zasilacze z wbudowanym konwerterem PFC, nadal nierzadko się zdarza, że dołączane obciążenie składa się z prostownika mostkowego z kondensatorem filtrującym. W chwili włączania zasilania takie obciążenie silnie obciąża wyjście.
Dlatego UPS musi zawierać specjalny algorytm minimalizujący udar prądowy związany z ładowanie takiej pojemności. Jest to ważna funkcja, gdyż udar prądowy może nawet 20-krotnie przewyższać wartość nominalną. Zamiast stosować falownik z dużym nadmiarem mocy wyjściowej, co jest nieefektywne pod względem kosztów i sprawności urządzenia, lepiej wykorzystać sterowniki PWM zawarte w kontrolerze dsPIC po to, aby zwiększać stopniowo współczynnik wypełnienia.
Wykonuje się to w ten sposób, że mierzony jest prąd płynący przez tranzystory falownika i gdy przekroczy on wartość maksymalną, ograniczany jest współczynnik wypełnienia impulsów sterujących. Po kilku sekundach, gdy układ oceni, że prąd wyjściowy nie zmienia się, układ PWM jest dezaktywowany.
Podsumowanie
 Opisany w artykule układ charakteryzuje się dużą funkcjonalnością przy niewielkiej złożoności i cenie. Wiele z tych zalet wynika z oparcia konstrukcji na programowalnym sterowniku, co daje możliwości prostej implementacji sterowania adaptacyjnego, logowania danych oraz zarządzania zasilaniem. Dokumentację opisanego projektu można pobrać z witryny internetowej firmy Microchip – www.microchip.com/offlineups.
Opisany w artykule układ charakteryzuje się dużą funkcjonalnością przy niewielkiej złożoności i cenie. Wiele z tych zalet wynika z oparcia konstrukcji na programowalnym sterowniku, co daje możliwości prostej implementacji sterowania adaptacyjnego, logowania danych oraz zarządzania zasilaniem. Dokumentację opisanego projektu można pobrać z witryny internetowej firmy Microchip – www.microchip.com/offlineups.
Artykuł udostępniony przez Farnella we współpracy z Microchip Technology.
Farnall
www.farnell.com/pl












