Implementacja technologii haptycznej w systemach elektronicznych
| TechnikaTechnologia haptyczna (z gr. haptikos - dotyk) umożliwia komunikowanie się z użytkownikiem za pomocą zmysłu dotyku, np. poprzez wibracje urządzenia. Implementacja tego typu rozwiązań wprowadza nowe możliwości interakcji z systemem, przez co pozytywnie wpływa na odbiór produktu.


Rys. 1. Rodzaje silników wykorzystywanych w rozwiązaniach haptycznych
Wykorzystanie technologii haptycznej w systemach elektronicznych nie jest niczym nowym - pierwsze prace nad takimi rozwiązaniami miały miejsce już w latach 60. XX wieku, głównie na potrzeby lotnictwa. Gwałtowny wzrost popularności tej technologii rozpoczął się jednak na początku XXI wieku, w związku z rozwojem technologii mobilnych oraz ekranów dotykowych.
Obecnie funkcjonalności haptyczne, takie jak drgania oraz wibracje, są podstawowym elementem wielu urządzeń elektronicznych, stanowiącym ważną część interfejsu i umożliwiającym komunikację zwrotną z użytkownikiem. Znajdują szerokie zastosowanie w smartfonach (wibracja informuje np. o nadchodzącym połączeniu lub wiadomości), kontrolerach gier, urządzeniach medycznych, lotnictwie, robotyce, panelach operatorskich, zabawkach, różnego typu symulatorach i urządzeniach treningowych - w zasadzie w każdej dziedzinie nowoczesnej elektroniki.
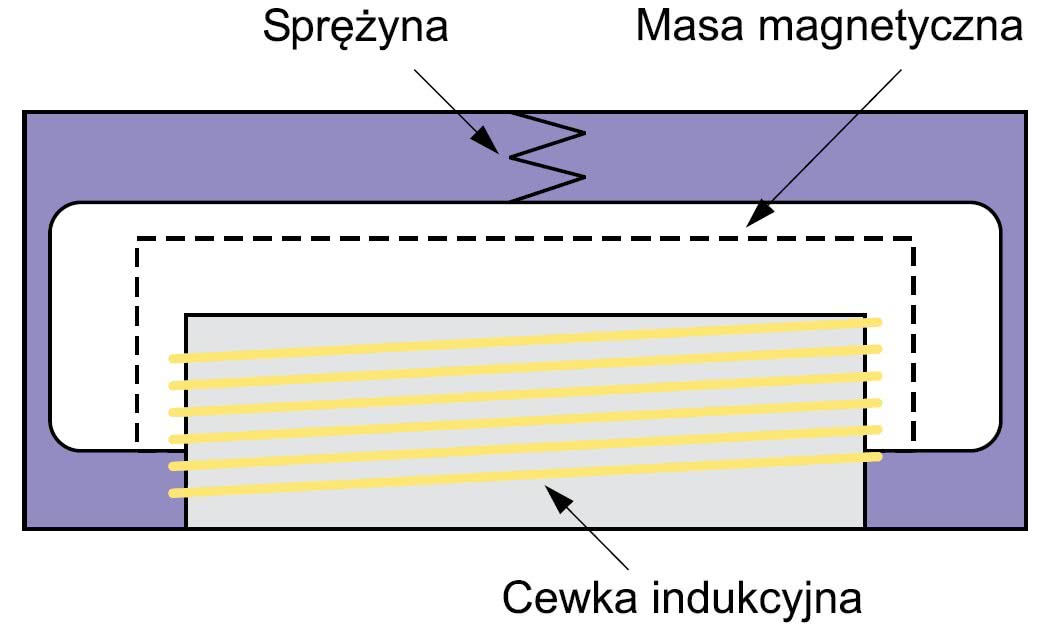
Rys. 2. Uproszczony schemat rezonatora liniowego LRA
Najczęściej wykorzystywanym rodzajem komunikacji haptycznej są wibracje - urządzenie przekazuje użytkownikowi określoną informację za pomocą drgań o zmiennym natężeniu i częstotliwości. Wibracje wytwarzane są przez silnik elektryczny sterowany przez odpowiednie układy elektroniczne.
O rosnącej popularności rozwiązań haptycznych świadczą prognozy rozwoju tej dziedziny rynku. Zgodnie z przewidywaniami analityków rynek sprzedaży układów związanych z technologią haptyczną będzie rozwijał się w najbliższych latach ze skumulowanym rocznym wskaźnikiem wzrostu (CAGR) rzędu 25%, osiągając w 2020 roku wartość 30 mld dol.
Technologia haptyczna a silniki elektryczne
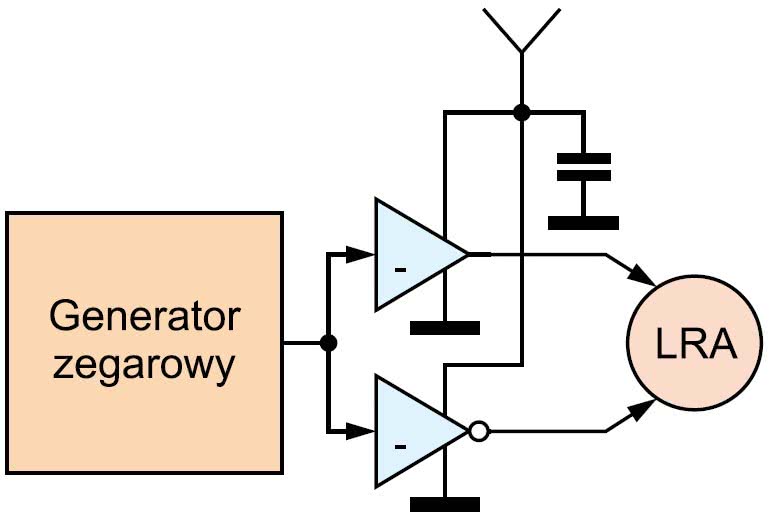
Rys. 3. Sterowanie silnikiem haptycznym za pomocą generatora sygnału zegarowego
Do implementacji rozwiązań haptycznych najczęściej wykorzystuje się różne rodzaje silników elektrycznych - na rysunku 1 przedstawiono najpopularniejsze z nich.
W silnikach ERM (Eccentric Rotating Mass) wibracje wytwarzane są podczas obrotów silnika za pomocą masy umieszczonej poza osią obrotu. Silnik sterowany jest różnicowo - napięcie ujemne pozwala na szybkie wyhamowanie układu.
Tego typu rozwiązania bardzo dobrze sprawdzają się jako alarmy wibracyjne, z powodu dużego zapotrzebowania na energię elektryczną słabo nadają się jednak do innych zastosowań (np. jako sygnalizacja w grach) - szybko powodowałyby wyczerpanie baterii urządzenia.
Inną wadą silników ERM jest długi czas reakcji - zarówno rozpędzenie, jak i zatrzymanie silnika zajmuje od 50 do 100 ms. Silnik ERM podczas pracy generuje również charakterystyczny dźwięk, których może być niepożądany w niektórych typach aplikacji.
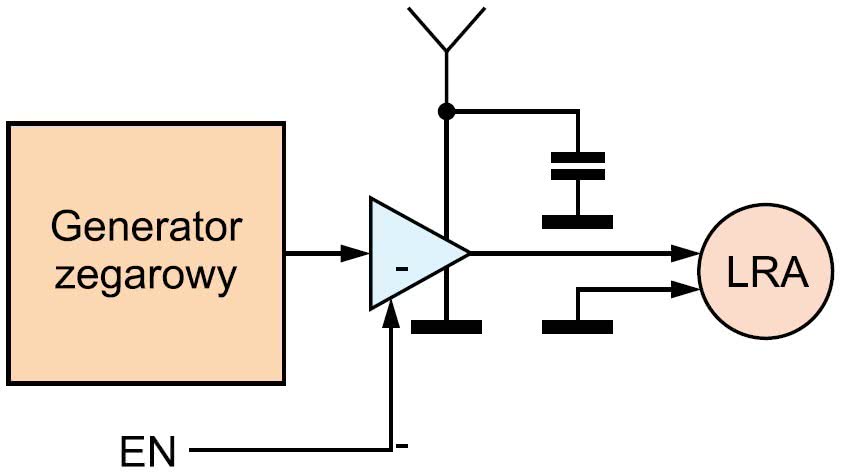
Rys. 4. Sterowanie silnikiem haptycznym za pomocą generatora sygnału sinusoidalnego
Silniki cylindryczne działają podobnie do układów ERM, charakteryzują się jednak większymi rozmiarami oraz dłuższymi czasami reakcji. Z tego powodu nie znajdują szerokiego zastosowania w mniejszych urządzeniach mobilnych.
Rezonatory liniowe (LRA, Linear Resonant Actuator) zbudowane są z masy o właściwościach magnetycznych połączonej z obudową za pomocą sprężyny (rys. 2). Generowane przez cewkę pole magnetyczne wywołuje ruch masy, w podobny sposób jak dzieje się to w przypadku głośników. Układ LRA wytwarza wibracje na jednej częstotliwości, będącej częstotliwością rezonansową układu.
Tego typu silniki charakteryzują się krótszym czasem reakcji niż ERM (od 40 do 60 ms), mają też mniejsze rozmiary. Za pomocą modulacji sygnału sterującego możliwe jest również wytwarzanie różnych efektów haptycznych, czyli różnych sekwencji drgań.
Sterowniki silników haptycznych
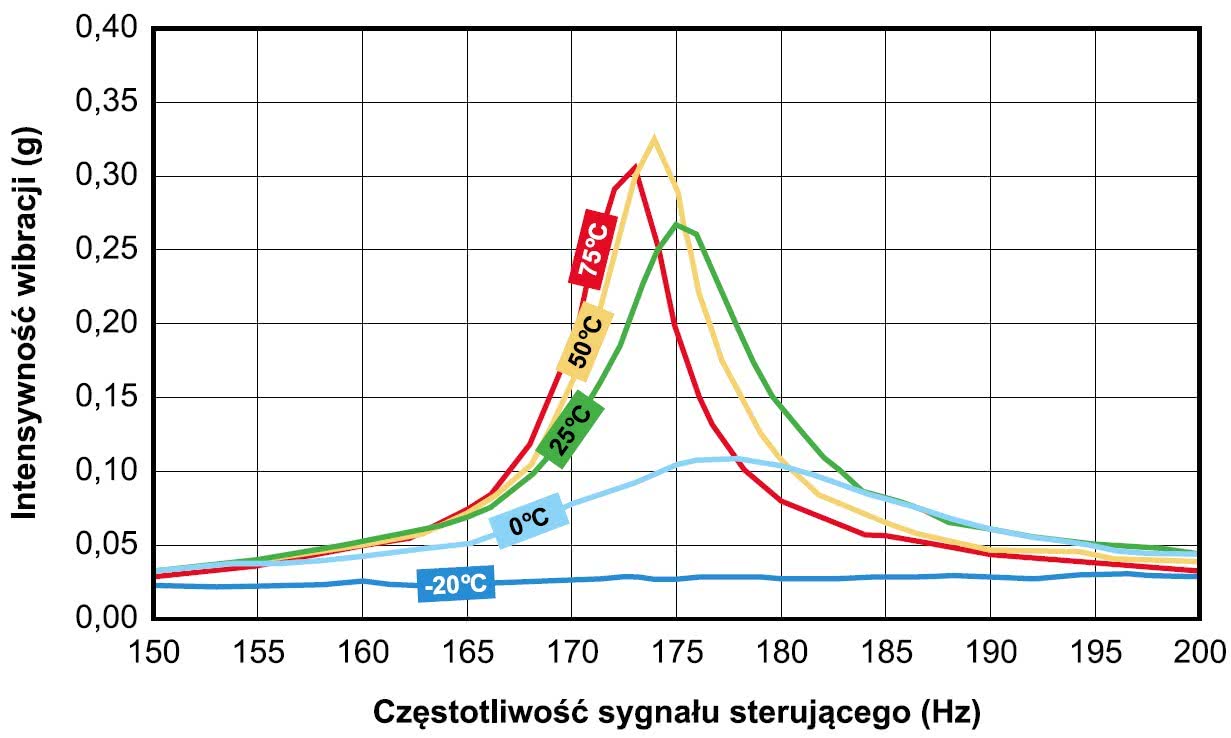
Rys. 5. Przykładowa zależność drgań układu LRA od temperatury otoczenia
Działanie silnika haptycznego musi być kontrolowane przez odpowiedni układ elektroniczny generujący sygnał sterujący. Układ taki może zostać zbudowany z elementów dyskretnych - z wykorzystaniem generatora sygnału zegarowego (rys. 3) lub sinusoidalnego (rys. 4).
Korzystanie z sygnału sinusoidalnego jest generalnie lepszym rozwiązaniem - łagodniejszy niż w przypadku sygnału zegarowego przebieg sygnału sterującego zmniejsza ryzyko uszkodzenia mechanizmu haptycznego, pozwala również osiągnąć tę samą siłę drgań przy mniejszym zużyciu energii elektrycznej. Układy generujące sygnał zegarowy są jednak tańsze, zajmują ponadto mniej miejsca na płytce drukowanej.
Alternatywą dla układów sterujących wykonywanych z elementów dyskretnych są dostępne na rynku gotowe układy sterowników silników haptycznych. Niektóre z nich mają możliwość automatycznej kalibracji częstotliwości sygnału sterującego do częstotliwości rezonansowej silnika haptycznego, co ma szczególne znaczenie w przypadku układów LRA.
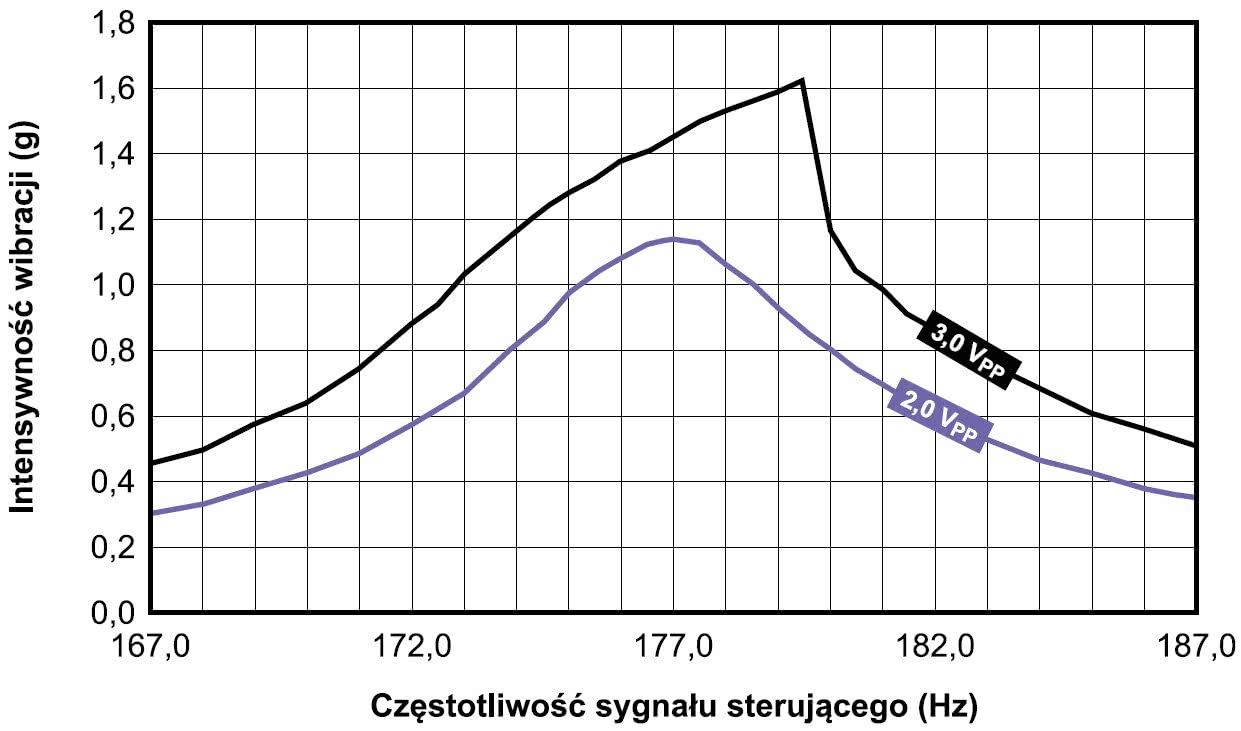
Rys. 6. Przykładowa zależność siły drgań LRA od amplitudy sygnału sterującego
Wartość częstotliwości rezonansowej układu LRA może zmieniać się w zakresie kilku herców w zależność od warunków pracy - m.in. temperatury otoczenia oraz orientacji w przestrzeni. Przykładowo, częstotliwość rezonansowa będzie inna w sytuacji, gdy urządzenie mające układ LRA znajduje się w ręku użytkownika, schowane jest w jego kieszeni, leży na twardej powierzchni lub wisi na pasku.
Jeśli LRA sterowany jest wciąż takim samym sygnałem sterującym, w niektórych z tych sytuacji doprowadzi to do braku synchronizacji pomiędzy częstotliwością sygnału a częstotliwością rezonansową układu, czego skutkiem będzie spadek amplitudy drgań urządzenia.
Efekt ten wyeliminować można za pomocą zwiększenia amplitudy sygnału sterującego lub właśnie za pomocą dopasowania częstotliwości sygnału do zmienionej częstotliwości rezonansowej. Na rysunkach 5, 6 i 7 przedstawiono przykładowe wykresy zależności częstotliwości rezonansowej układu LRA od temperatury otoczenia, amplitudy sygnału sterującego oraz położenia układu.
Piezoelektryczne układy haptyczne
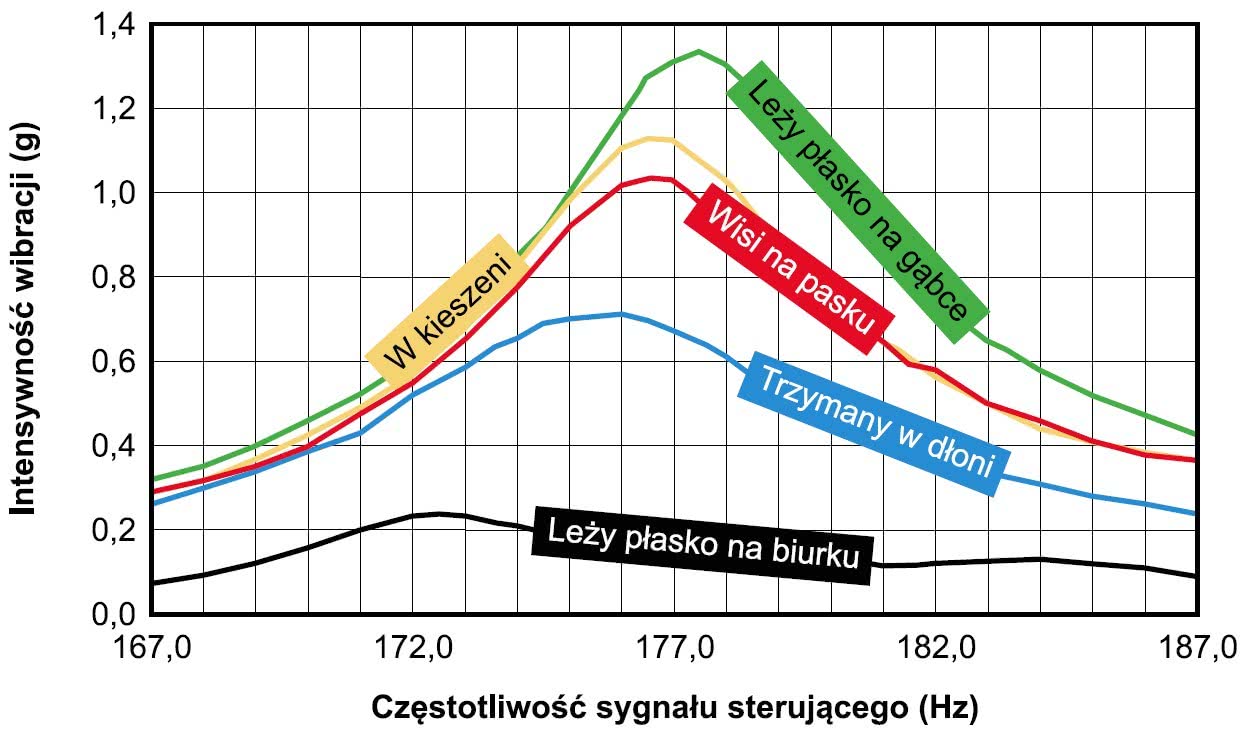
Rys. 7. Przykładowa zależność siły drgań LRA od położenia układu
Alternatywą dla opisanych powyżej silników elektrycznych mogą być układy piezoelektryczne. Piezoelektryk to materiał, który odkształca się pod wpływem działania pola elektrycznego, która to właściwość może zostać wykorzystana do wytworzenia drgań oraz innych efektów haptycznych.
Wadą układów piezoelektrycznych jest niewątpliwie wysoka wymagana amplituda sygnału sterującego - w zależności od konstrukcji materiału (liczby warstw piezoelektrycznych), układy tego typu wymagają napięć rzędu od 50 do 150 V. Do generowania odpowiedniego sygnału, podobnie jak w przypadku silników elektrycznych, wykorzystać można jednak układy sterowników.
Haptyczne układy piezoelektryczne produkowane są najczęściej w postaci dysków lub prostokątnych pasków, określanych jako tzw. bender. Dyski odkształcają się w płaszczyźnie wertykalnej, dzięki czemu mogą być wykorzystane do generowania wibracji wzdłuż osi z. Paski mogą być montowane w określonych miejscach urządzenia, aby generować punktowe wibracje tylko określonych obszarów obudowy. Mogą być również wykorzystane do generowania drgań całego urządzenia, szczególnie w przypadku mniejszych urządzeń (rys. 8).
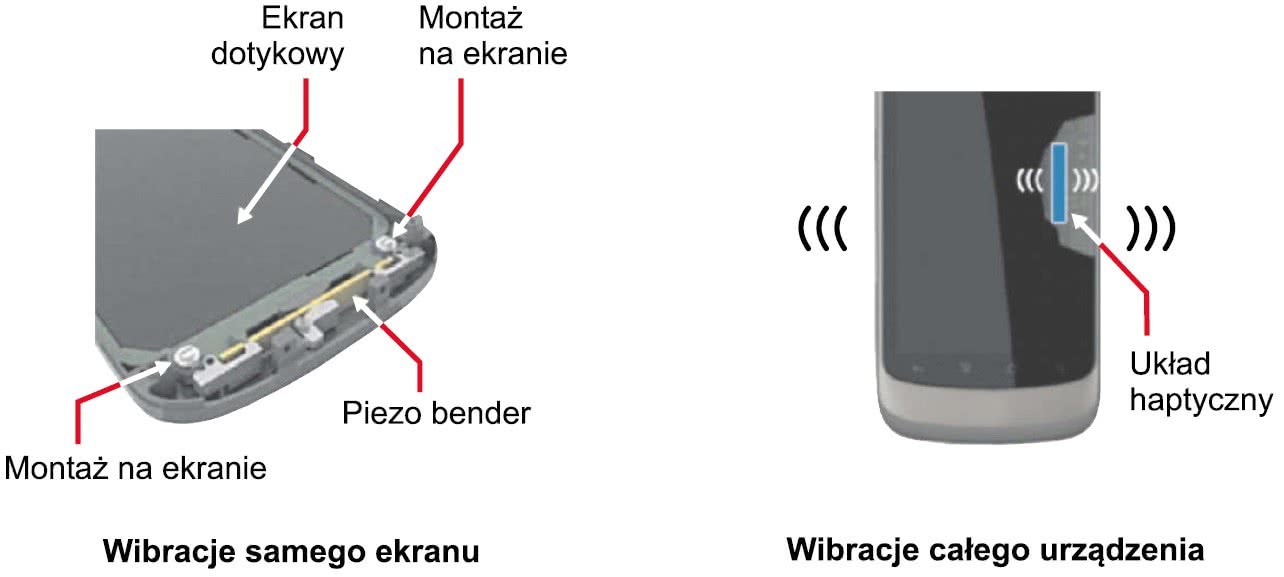
Rys. 8. Paski piezoelektryczne mogą być wykorzystane do generowania wibracji całego urządzenia lub jedynie określonych jego elementów, np. samego ekranu
Układy piezoelektryczne mają wiele zalet:
- charakteryzują się krótkim czasem reakcji na wymuszenie, typowo ok. 15 ms, co jest wartością średnio trzykrotnie lepszą niż w przypadku układów LRA,
- mają znacznie szersze pasmo dostępnych częstotliwości drgań, wynoszące ok. 150 Hz (najczęściej od ok. 100 do ok. 250 Hz). Pasmo układów LRA to ok. 15 Hz. Szersze pasmo pozwala na wytworzenie większej liczby różnych efektów haptycznych,
- układy piezoelektryczne w przeciwieństwie do silników elektrycznych nie mają ruchomych elementów mechanicznych, dzięki czemu pracują znacznie ciszej,
- układy piezoelektryczne pozwalają na generowanie drgań o większym natężeniu, dochodzącym do wartości międzyszczytowej 3 g, podczas gdy układy LRA nie przekraczają zazwyczaj wartości 2 g.
W porównaniu do silników LRA, układy piezoelektryczne charakteryzują się większym zużyciem energii elektrycznej (w zależności od sposobu wykorzystania jest to różnica od kilkunastu do kilkudziesięciu procent).
Podsumowanie
Implementacja technologii haptycznej nie powinna być współcześnie dla konstruktora dużym problemem, przede wszystkim z racji szerokiej oferty dostępnych na rynku gotowych rozwiązań. Ważne jednak, by wybrać rozwiązanie najbardziej dostosowane do uwarunkowań projektu. Zarówno implementacje oparte na silnikach elektrycznych, jak i na układach piezoelektrycznych mają swoje zalety.
Układy piezoelektryczne pozwalają na uzyskanie zróżnicowanych efektów haptycznych, w dodatku pracują ciszej oraz szybciej od układów mechanicznych. Regulatory liniowe (LRA) charakteryzują się za to niższym zużyciem energii elektrycznej, co w przypadku układów zasilanych bateryjnie może być dużym atutem.
Damian Tomaszewski