KNX - otwarty standard automatyki budynkowej
| TechnikaSystemy automatyki budynkowej stanowią nagromadzenie różnego typu czujników i elementów wykonawczych. Służą one do sterowania instalacjami użytkowymi i wyposażeniem w domach, budynkach komercyjnych i obiektach użyteczności publicznej, na przykład oświetleniem, ogrzewaniem, wentylacją, systemami alarmowymi, sprzętami AGD, roletami. W tym celu wymieniają się danymi pomiarowymi oraz sterującymi. By ułatwić tworzenie systemów automatyki budynkowej i rozwiązywanie problemów w ich działaniu standaryzuje się sposób organizacji i przebieg komunikacji pomiędzy ich komponentami.

Pierwsze systemy automatyki budynkowej opierały się na standardach zamkniętych, czyli takich, w których pełna specyfikacja stanowiła tajemnicę producenta. Przez to korzystanie z nich wiązało się ze znaczącymi kosztami. Dlatego początkowo automatyzowano głównie duże budynki publiczne, jak na przykład stadiony, lotniska, biurowce, centra handlowe.
W latach osiemdziesiątych zeszłego wieku wprowadzono nową kategorię - otwartych standardów automatyki budynkowej. Ich specyfikacje są upubliczniane bezpłatnie. Dzięki temu każdy może wprowadzać na rynek urządzenia oraz oprogramowanie zgodne z nimi.
Pozwala to na znaczące obniżenie kosztów realizacji i modernizacji opartych na nich systemów sterowania budynkiem i większą elastyczność w tym zakresie. Dzięki otwartym specyfikacjom automatyka upowszechniła się też w domach prywatnych. Jednym z popularniejszych standardów w tej kategorii jest KNX, który będzie tematem tego artykułu.
Historia standardu KNX
KNX został opracowany w oparciu o powstałe we wczesnych latach 90. minionego stulecia standardy Batibus, EIB i EHS. Początkowo rywalizowały one o udziały w europejskim rynku, z sukcesem w wielu krajach. Na przykład we Francji, Włoszech oraz Hiszpanii dużą popularność zyskał pierwszy z wymienionych.
EIB z kolei ugruntował swoją pozycję w północnej Europie i krajach niemieckojęzycznych, EHS natomiast szczególnie upodobali sobie producenci sprzętów AGD oraz elektroniki użytkowej. Mimo to żaden z tych standardów nie uzyskał powszechnego uznania i ogólnoeuropejskiego, ani tym bardziej światowego, zasięgu.
W związku z tym w 1997 roku organizacje, które odpowiadały za rozwój specyfikacji Batibus, EIB oraz EHS, postanowiły połączyć siły i stworzyć nowy standard dla inteligentnych budynków, który w przyszłości mógłby uzyskać status międzynarodowego. W tym celu powołano stowarzyszenie KNX Association.
Efektem prac jego członków był standard KNX, który został opublikowany wiosną 2002 roku. Bazował on przede wszystkim na specyfikacji EIB, uzupełnionej o mechanizmy konfiguracji oraz media komunikacyjne, z których korzystano w systemach automatyki budynkowej opartych na standardach Batibus oraz EHS.
Od normy regionalnej do międzynarodowej
Wkrótce KNX uzyskał aprobatę organizacji normalizacyjnych, najpierw europejskich, a później też międzynarodowych. Już pod koniec 2003 roku Europejski Komitet Normalizacyjny Elektrotechniki CENELEC zaakceptował ten standard komunikacji w oparciu o dwa media, skrętkę oraz instalację elektryczną w budynku, jako normę EN 50090. Trzy lata później, w 2006 roku, uzupełniono go o łączność radiową. Kolejną organizacją był Europejski Komitet Normalizacyjny CEN, który KNX przyjął w 2006 roku jako normy EN 13321-1 oraz EN13321-2.
W związku z rosnącym zainteresowaniem standardem KNX także poza Europą KNX Association podjęło starania o nadanie mu statusu międzynarodowego. W tym celu CENELEC przedstawiło normę EN 50090 jako propozycję do standaryzacji przez ISO/IEC już w 2004 roku.
Dwa lata później protokół KNX wraz ze wszystkimi mediami transmisyjnymi, czyli skrętką, instalacją elektryczną, Ethernetem oraz łączem radiowym został zaakceptowany jako międzynarodowy standard ISO/IEC 14543. W 2013 roku ogłoszono także chińską wersję KNX w postaci normy GB/T 20965. Poza tym przyjęto go jako ANSI/ASHRAE Standard 135 i ISO 16484-5.
Przegląd mediów transmisyjnych
Systemy automatyki oparte na standardzie KNX wyróżnia na tle innych kilka cech. Są to m.in.: decentralizacja, przy jednoczesnej możliwości wykorzystania jednostki centralnej, gdy wymaga tego aplikacja, liczba urządzeń, z których mogą się składać, sięgająca 50 tysięcy (teoretycznie), możliwość kontynuowania pracy przez urządzenia, które są zadaniowo niezależne od tego, które uległo awarii oraz odłączania urządzeń od magistrali bez wpływu na komunikację pomiędzy pozostałymi.
Dalej szerzej przedstawiamy wybrane aspekty standardu KNX, w tym: dopuszczalne media transmisyjne, topologie, klasyfikację i budowę urządzeń, porady na temat instalacji oraz oprogramowanie do projektowania, konfiguracji, programowania i diagnostyki.
Jak wspomniano wcześniej, wymiana danych pomiędzy komponentami systemu automatyki budynkowej opartego na standardzie KNX może być realizowana za pośrednictwem czterech mediów: skrętki (protokół KNX Twisted Pair, KNX TP), instalacji elektrycznej (protokół KNX Powerline, KNX PL), łącza radiowego (protokół KNX Radio Frequency, KNX RF) i Ethernetu (protokół KNX IP).
Dzięki temu, że do wyboru jest tyle opcji, łatwo można wskazać najlepszą z nich w zależności od wymagań albo utrudnień, na przykład wtedy, gdy system automatyki trzeba zorganizować w budynku, w którym brak nowoczesnych rozwiązań technicznych lub istnieją w nim ograniczenia przestrzenne utrudniające instalację. Dalej przedstawiamy szczegóły trzech z wymienionych protokołów: KNX TP, KNX PL oraz KNX RF.
KNX TP
Jeżeli chodzi o skrętkę, jest to najpowszechniej wykorzystywany sposób łączenia urządzeń w magistralach KNX. Do jej najważniejszych zalet zalicza się: niski koszt, łatwość instalacji oraz odporność na zaburzenia elektromagnetyczne. Za pośrednictwem skrętki są jednocześnie przesyłane dane oraz zasilanie. Napięcie znamionowe w magistrali KNX TP wynosi 24 V, napięcie wyjściowe zasilaczy to 30 V, zaś urządzenia w sieci wymagają zasilania napięciem w przedziale 21-30 V, co zapewnia margines 9 V, który przewidziano, żeby zrekompensować spadki napięć na przewodach.
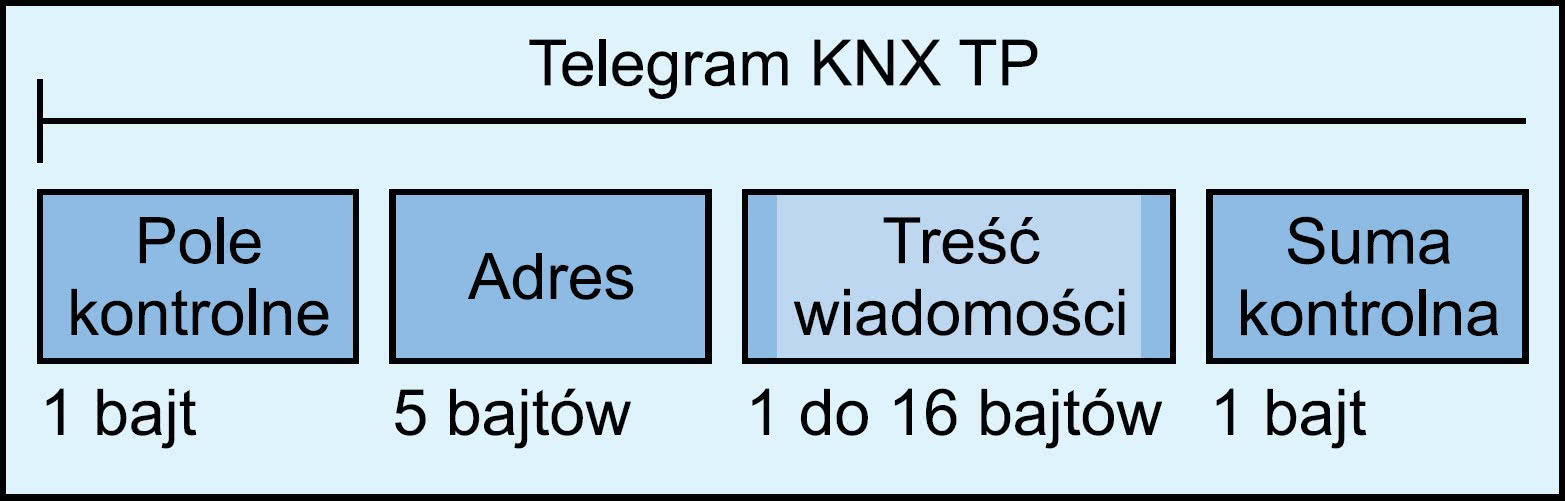
Prędkość transmisji wynosi 9600 b/s, zaś dane przesyłane są szeregowo asynchronicznie. Urządzenia wymieniają się informacjami w postaci tzw. telegramów. Składają się one z czterech typów pól o różnej długości.
W polu jednobajtowym zapisywany jest priorytet wiadomości i informacja o tym, czy telegram jest przesyłany powtórnie w związku z tym, że poprzednia wiadomość nie została dostarczona do odbiorcy. W kolejnym, liczącym pięć bajtów polu, zapisywane są adresy: nadawcy i odbiorcy bądź odbiorców (adres grupowy). Informacje stanowiące treść wiadomości są przesyłane w polu o zmiennej długości, od jednego do 16 bajtów.
Ostatnie jednobajtowe pole służy do sprawdzania sumy kontrolnej telegramu. Dostęp do magistrali jest losowy i wyzwalany zdarzeniami, a kolizjom zapobiega mechanizm CSMA/CA (Carrier Sense Multiple Access / Collision Avoidance).
KNX PL
Wykorzystanie istniejącej w budynku instalacji elektrycznej jako medium transmisyjnego ułatwia i przyspiesza realizację systemu automatyki, a przede wszystkim znacząco zmniejsza koszty takiego przedsięwzięcia. Ma to także znaczenie w przypadku obiektów, w których z różnych powodów nie powinno się nadmiernie ingerować w konstrukcję, na przykład budynków zabytkowych.
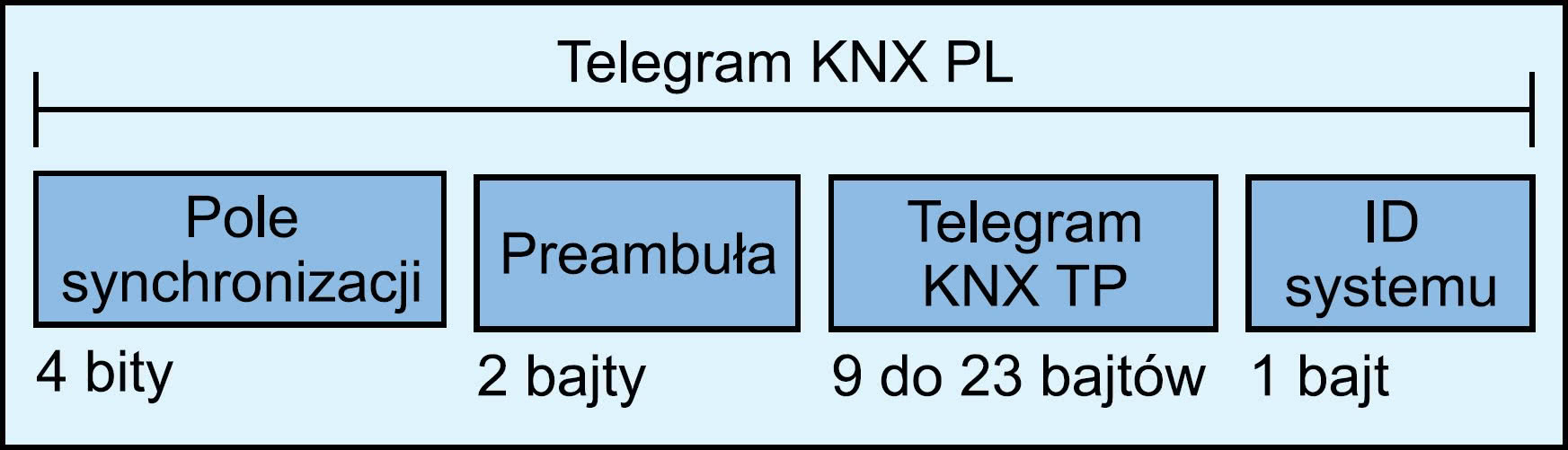
Z oczywistych powodów sieci KNX PL nie wymagają zasilaczy. Prędkość transmisji wynosi w ich przypadku 1200 b/s, a zastosowana metoda modulacji to S-FSK (Spread Frequency Shift Keying). Jeśli chodzi o strukturę telegramu, to w transmisji danych za pośrednictwem sieci elektrycznej korzysta się z ramek stanowiących rozszerzenie telegramów KNX TP, które uzupełniono o trzy nowe pola.
Są to: czterobitowe pole synchronizacji nadajnika z odbiornikiem, dwubajtowa preambuła, która sygnalizuje początek transmisji oraz zawiera informacje potrzebne w zarządzaniu dostępem do magistrali, aby można było uniknąć kolizji oraz jednobajtowe pole, w którym zapisywany jest unikalny numer identyfikujący urządzenia, które działają w ramach jednego systemu. Między polem preambuły a polem identyfikatora systemu w ramce KNX TP mieści się telegram w formacie KNX TP, o długości od 9 do 23 bajtów.
W zakresie kontroli dostępu do łącza w magistrali KNX PL, aby uniknąć kolizji, zastosowano następujące podejście: domyślnie wszystkie urządzenia działają w trybie odbiornika i dopiero wówczas, gdy spełnione są specjalne warunki, mogą się przełączać w tryb nadawania. W takim przypadku najpierw dany węzeł sprawdza, czy aktualnie żaden inny nie nadaje. Jeśli rozpozna bity preambuły, uznaje magistralę za zajętą i przerywa nadawanie, które wznawia dopiero po upływie losowo wybranego czasu.
KNX RF

Łączność radiowa jest preferowana szczególnie, gdy komponenty systemu automatyki znajdują się w trudnodostępnych miejscach budynku, gdzie nie doprowadzono instalacji elektrycznej, a których okablowanie byłoby drogie lub niemożliwe. Korzysta się z niej także w razie rozbudowy istniejącej sieci KNX, na przykład opartej na skrętce.
Czujniki, które umieszcza się w miejscach o ograniczonej dostępności, gdzie nie ma możliwości ich podłączenia do zasilania z sieci energetycznej, korzystają z baterii. Aby maksymalnie wydłużyć czas ich rozładowania, sensory włączają się tylko wtedy, gdy są przesyłane dane pomiarowe.
Wychodząc naprzeciw takiej potrzebie, w standardzie KNX został przewidziany tryb transmisji bezprzewodowej jednokierunkowej dla węzłów sieci, które nie mają odbiornika. Węzły zasilane z sieci i wyposażone w odbiornik, którymi przeważnie są elementy wykonawcze systemu automatyki, powinny pracować w trybie transmisji dwukierunkowej.
W KNX RF stosowana jest modulacja częstotliwości. Rozróżnić można dwa tryby pracy: KNX RF Ready oraz KNX RF Multi. W pierwszym korzysta się tylko z kanału transmisji na częstotliwości 868,3 MHz. Ponieważ dysponując jednym pasmem, trzeba się liczyć z silnym wpływem zaburzeń i interferencjami z sygnałami nadawanymi na tej częstotliwości przez inne źródła, wprowadzono tryb KNX Multi.
Przewidziano w nim możliwość przełączania się pomiędzy kilkoma kanałami. Ponadto podzielono je na dwie kategorie: szybkie i wolne. W pierwszych szybkość transmisji wynosi 16,4 kb/s, a w wolnych 8,2 kb/s. Szybkie kanały są trzy (F1 - 868,3 MHz, F2 - 868,95 MHz, F3 - 869,85 MHz), zaś wolne - dwa (S1 - 869,85 MHz, S2 - 869,525 MHz). W trybie sleep węzły pracujące w pasmach F1-F3 mogą ograniczyć zużycie energii o 80%, a te w kanałach S1 i S2 aż o 99%.
Telegramy w KNX RF składają się z bloków danych oddzielonych polami z sumą kontrolną. Pierwsze zawierają treść wiadomości i dane dodatkowe, w tym m.in. informacje o: długości telegramu, jakości transmisji, poziomie naładowania baterii.
Jeżeli chodzi o zarządzanie dostępem do łącza, to w przypadku urządzeń działających wyłącznie w trybie transmisji jednokierunkowej przyjęto założenie, że ponieważ przeważnie przesyłają bardzo krótkie wiadomości, praktycznie nie ma możliwości, aby wystąpiła pomiędzy nimi kolizja danych. Z kolei węzły komunikujące się dwukierunkowo przed rozpoczęciem nadawania muszą sprawdzić zajętość kanału.
Organizacja sieci KNX TP
Podstawową jednostką organizacyjną w sieciach KNX TP jest linia. Składa się ona z zasilacza oraz nie więcej niż 64 innych urządzeń. Bazując na linii można zbudować sieć w topologii drzewa, dodając rozgałęzienia w dowolnych jej punktach. Jeżeli musi się ona składać z większej liczby urządzeń w celu stworzenia nowych segmentów linii, powinno się skorzystać ze wzmacniaczy sygnału.
W jednej linii można użyć najwyżej trzech regeneratorów sygnału. To oznacza, że maksymalnie może się ona składać z 255 węzłów. Innym rozwiązaniem jest połączenie kilku linii za pomocą sprzęgaczy. Taką siecią łatwiej się zarządza. Ogranicza to także zbędny ruch sieciowy. Maksymalnie 15 linii sprzężonych z linią główną tworzy obszar.
Podobnie najwyżej 15 obszarów można sprzęgnąć z obszarem głównym. Taki sposób organizacji ma kilka zalet, w tym: zapewnia separację galwaniczną, wszystkie linie i obszary mają własne zasilanie, nawet gdy jeden zasilacz ulegnie awarii, system jako całość działa dalej, a lokalny ruch sieciowy w linii lub w obszarze nie wpływa na natężenie ruchu w innych liniach i obszarach.
By zapewnić odpowiednią jakość sygnału i nie przekroczyć jego maksymalnego dopuszczalnego opóźnienia, trzeba przestrzegać określonych odległości pomiędzy komponentami sieci KNX TP. I tak na przykład dystans między zasilaczem a urządzeniem nie powinien przekroczyć 350 m. Z kolei maksymalna odległość dwóch urządzeń w linii to 700 m, a długość segmentu linii to najwyżej 1000 m.
Organizacja sieci KNX PL, KNX RF, mieszanych
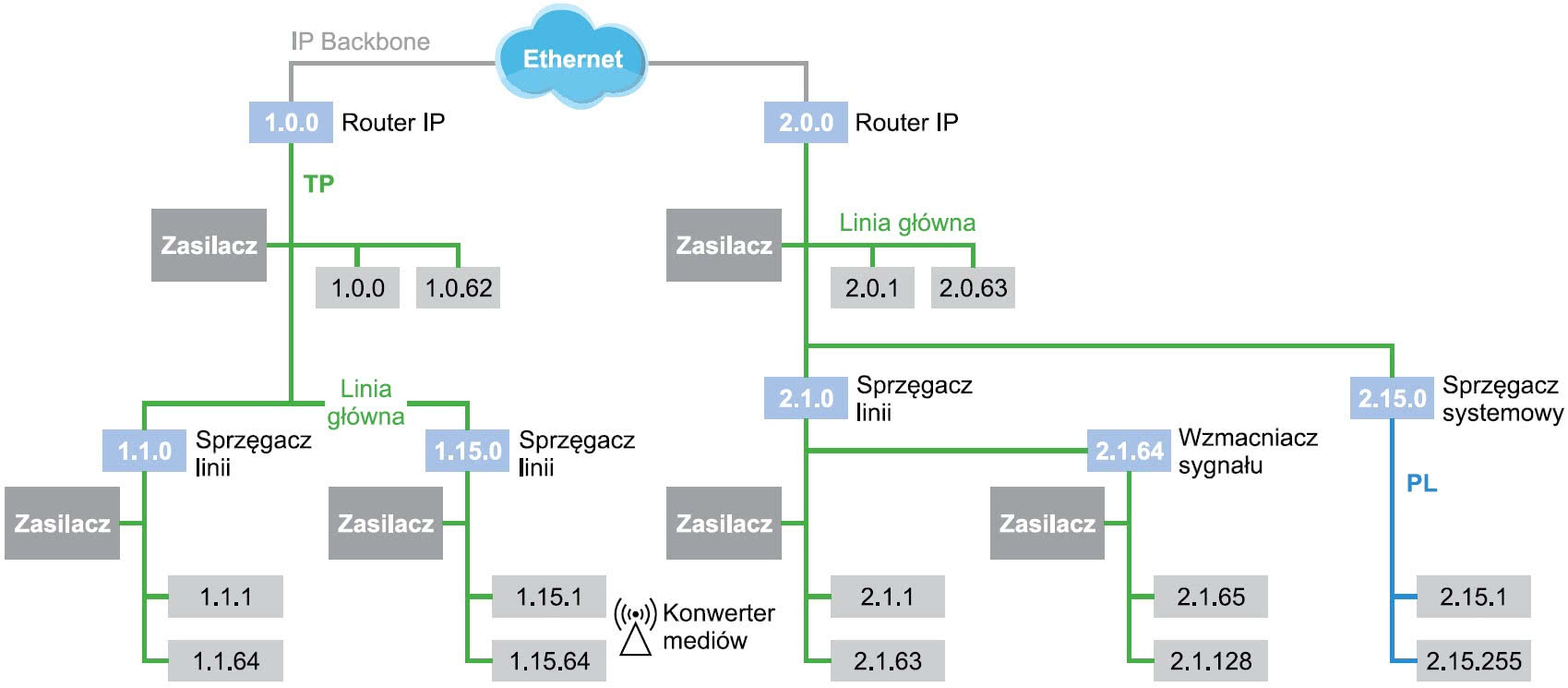
Każde urządzenie w sieci KNX TP ma unikalny, jednoznacznie go identyfikujący numer (adres). Składa się on z trzech cyfr oddzielonych kropkami. Cyfry określają pozycję urządzenia względem innych komponentów sieci. Pierwsza wskazuje na obszar, do którego należy dane urządzenie, zaś druga linię.
Trzecia cyfra odpowiada jego numerowi w linii. W przypadku sprzęgaczy obszarów i sprzęgaczy linii ta ostatnia to 0. Na przykład sprzęgacz, który łączy pierwszą linię z linią główną w obszarze pierwszym, będzie miał adres 1.1.0, zaś urządzeniu piętnastemu z kolei w drugiej linii w trzecim obszarze zostanie przypisany numer 3.2.15.
Sieci KNX PL, podobnie jak KNX TP, składają się z linii oraz obszarów. Podstawową jednostką organizacyjną jest w nich linia złożona z najwyżej 255 urządzeń. Obszar tworzy się, sprzęgając ze sobą 15 linii. Maksymalnie można utworzyć 8 obszarów. Zamiast sprzęgaczy linii w sieciach KNX PL używa się sprzęgaczy systemowych, w których adresie, podobnie jak w przypadku sprzęgaczy KNX TP, ostatnia cyfra to 0.
W KNX RF odbiorniki komunikują się ze sparowanymi z nimi nadajnikami, rozpoznając je na podstawie identyfikatorów w telegramach. Z sieciami, w których korzysta się z innych mediów transmisyjnych, można je łączyć za pośrednictwem konwerterów mediów, na przykład KNX TP / KNX RF. Ponadto tworzy się sieci mieszane, których poszczególne segmenty tworzą sieci KNX TP, KNX PL, KNX IP i KNX RF (rys. 4).
Typy urządzeń
W systemach automatyki budynkowej opartych na standardzie KNX wyróżnić można zasadniczo dwie grupy urządzeń: systemowe i końcowe, czyli na przykład czujniki i elementy wykonawcze.
Jeżeli chodzi o urządzenia systemowe, to do tej kategorii zaliczane są wszystkie te, które pełnią funkcje specjalne w zakresie zasilania, przyłączania do sieci i programowania. Przykładami są: zasilacze linii KNX TP, interfejsy KNX TP USB, służące do programowania systemów KNX, sprzęgacze linii oraz obszarów KNX TP, filtry KNX PL blokujące przepływ telegramów poza określony zasięg, sprzęgacze faz KNX PL, sprzęgacze systemowe KNX PL, routery KNXnet/IP i interfejsy KNXnet/IP do programowania systemów KNX oraz konwertery mediów KNX RF.
Z kolei urządzenia końcowe składają się z dwóch części: jednostki BCU (Bus Coupling Unit) oraz modułu aplikacyjnego. Jeżeli są wykonane jako oddzielne podzespoły, łączy się je poprzez interfejs PEI (Physical External Interface). BCU zbudowane są z dwóch modułów funkcyjnych: kontrolera i komunikacji. Ten drugi jest specyficzny dla wybranego medium transmisyjnego. W związku z tym wyróżnia się m.in. moduły komunikacji dla sieci KNX TP i KNX PL.
Instalacja systemu KNX. Oprogramowanie ETS
Przygotowując się do instalacji systemów automatyki budynkowej opartych na standardzie KNX, warto rozważyć kilka kwestii. Na przykład należy się zastanowić, czy nie można by, i jeżeli tak, to w jakim zakresie, wykorzystać elementów instalacji istniejącej w budynku, na przykład włączników.
W przypadku sieci KNX PL do transmisji danych nie powinno się używać kabli ekranowanych z uziemionym ekranem ani o przekroju poprzecznym powyżej 25 mm². Planując sieć KNX RF, należy z kolei przeanalizować potencjalny wpływ konstrukcji budynku na jakość transmisji.
System KNX można programować bezpośrednio w trybie Easy Mode (E-Mode) lub korzystając z komputera, na którym zostało zainstalowane specjalne oprogramowanie - ETS (Engineering Tool Software), czyli w trybie System Mode (S-Mode). Po zainstalowaniu tej aplikacji należy do niej zaimportować dane urządzeń, z których projektowana instalacja będzie się składać.
Przeważnie udostępniają je bezpłatnie w Internecie ich producenci. Następnie trzeba podać informacje o strukturze budynku, określić topologię magistrali, podać adresy urządzeń, w tym także adresy grupowe umożliwiające jednoczesne sterowanie wieloma urządzeniami i zdefiniować ich role, przykładowo precyzując, do czego ma służyć dany przycisk, a na koniec połączyć elementy współpracujące ze sobą, czyli czujniki oraz przyciski z elementami wykonawczymi.
Po skonfigurowaniu całej instalacji oraz ustawień urządzeń zostają one zaprogramowane. Poza projektowaniem i programowaniem urządzeń w programie ETS dostępnych jest wiele funkcji diagnostycznych, na przykład umożliwiające: odczytanie aktualnych statusów węzłów sieci KNX, analizę telegramów i natężenia ruchu w sieci oraz zdalne testowanie urządzeń wykonawczych.
Monika Jaworowska