
Od oscylatorów kwarcowych po generatory MEMS. Przegląd źródeł częstotliwości taktowania urządzeń elektronicznych
| TechnikaZegar taktujący to "serce" większości urządzeń elektronicznych. Generuje on przebieg o określonej częstotliwości, będący sygnałem odniesienia lub synchronizacji bloków urządzenia. Dokładność i stabilność zegara bezpośrednio przekłada się na jakość realizowanych zadań. Dlatego wybór źródła częstotliwości taktowania nie jest sprawą błahą, tym bardziej że możliwości jest wiele, od generatorów LRC i ceramicznych, przez rezonatory kwarcowe, w tym oscylatory z pętlą fazową i czujnikami temperatury, aż po generatory MEMS.
Wpływ temperatury, zmiany starzeniowe
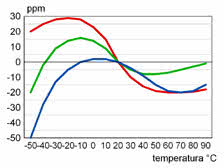
Największy wpływ na stabilność rezonatora kwarcowego mają zmiany temperatury. Odchylenia częstotliwości jego drgań od częstotliwości początkowej spowodowane fluktuacjami temperatury mogą sięgać nawet kilkuset ppm. Wiele zależy od sposobu wycięcia płytki kwarcu, co na przykładzie cięć typu BT, DT i CT ilustrują rysunki 5, 6 i 7. W niektórych przypadkach zmiana częstotliwości jest nieznaczna, a charakterystyka ma przebieg prawie płaski. W innych z kolei w pewnym przedziale temperatur obserwować można nagły i duży wzrost błędu częstotliwości.
Rys. 8. Nawet niewielka zmiana kąta cięcia może znacząco wpłynąć na temperaturową stabilność częstotliwości rezonatora. Na wykresie charakterystyki płytek kwarcowych wykonanych z cięcia AT przy zmianie kąta o kilka sekund kątowych |
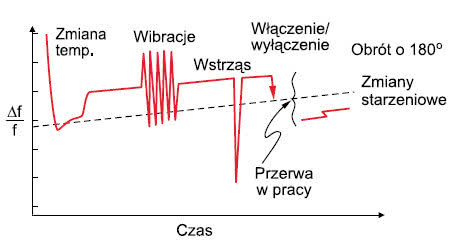
Rys. 9. Na stabilność częstotliwości drgań kwarcu wpływa szereg czynników, m.in. starzenie się kwarcu oraz wstrząsy i wibracje |
Co więcej nawet niewielka zmiana kąta cięcia może znacząco wpłynąć na stabilność temperaturową rezonatora, co dla cięcia AT zilustrowano na rys. 8. Ponieważ nie można całkowicie uniknąć zmiany częstotliwości rezonansowej, zwłaszcza jeżeli rezonator pracuje w szerokim zakresie temperatur, by minimalizować związane z tym problemy wykorzystuje się różne metody kompensacji. Problemem jest też starzenie się kwarcu.
Naprężenia, jakim podlega płytka drgająca, a także zanieczyszczenia np. pozostawione na powierzchni płytki w czasie produkcji powodują, że zmienia się m.in. jej współczynnik sprężystości. Przeważnie kryształ rezonatora najszybciej starzeje się w pierwszym roku pracy, gdy jego dokładność spada o około 5 ppm. W kolejnych latach jest to już raczej stały spadek, rzędu od 1 do 3 ppm rocznie. Na stabilność częstotliwości rezonatora mają wpływ też wibracje, wstrząsy oraz przyciąganie ziemskie.
Naprężenia będące skutkiem tego ostatniego czynnika wpływają na częstotliwość rezonatora w zależności od jego orientacji. Oznacza to, że rezonator skalibrowany w jednej pozycji przy jej zmianie będzie miał już inną częstotliwość drgań. Typowy rząd wielkości błędu częstotliwości przy obrocie o 180º to 0,001 ppm. Wstrząsy oraz wibracje, czyli zazwyczaj słabsze, ale za to dłużej trwające oddziaływania także są przyczyną dodatkowych naprężeń, które działając na płytkę rezonatora skutkują zmianą częstotliwości rzędu 0,001 ppm przy wstrząsie o sile 1G.
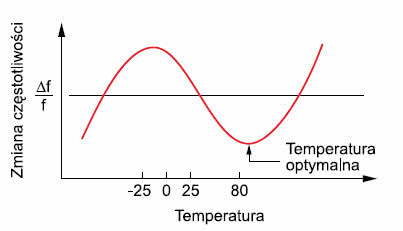
Rys. 10. Optymalną temperaturę pracy wybiera się na podstawie temperaturowej charakterystyki błędu częstotliwości kwarcu |
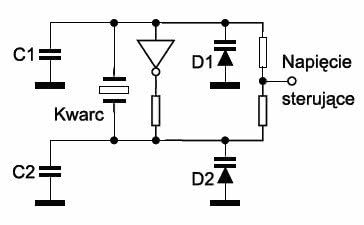
Rys. 11. VCXO to oscylator kwarcowy uzupełniony o elementy o regulowanej reaktancji |
W przypadku rezonatorów kwarcowych zaobserwować można jeszcze jedno niekorzystne zjawisko. Polega ono na tym, że częstotliwość oscylatora włączonego pod dłuższej przerwie może się zmienić. Błąd częstotliwości tym spowodowany jest zazwyczaj rzędu 0,01 ppm. Wpływ wszystkich wymienionych czynników na stabilność częstotliwości rezonatorów kwarcowych zobrazowano na rys. 9.
OXCO, VCXO, TCXO
Istnieje kilka sposobów kompensacji wpływu temperatury na stabilność częstotliwości rezonansowej kwarcu. Jednym z rozwiązań jest kontrola oraz stabilizacja temperatury pracy rezonatora. Optymalną wartość temperatury wyznacza się na podstawie temperaturowej charakterystyki błędu częstotliwości rezonatora, wybierając wartość odpowiadającą minimalnej zmianie częstotliwości (rys. 10). Najlepsze rezultaty osiąga się, gdy temperaturę pracy ustala się na od 15 do 20° powyżej maksymalnej przewidywanej temperatury otoczenia, w jakiej pracować będzie oscylator.
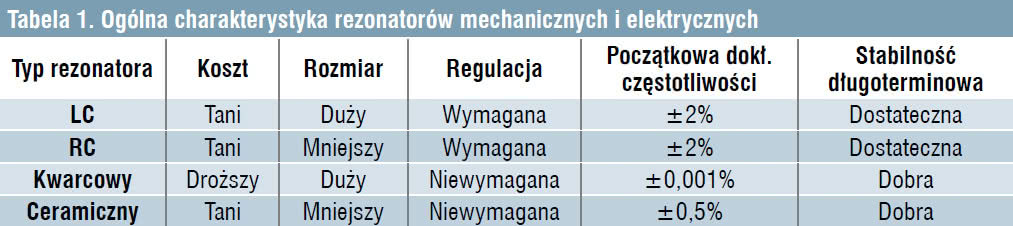
Tabela 1. Ogólna charakterystyka rezonatorów mechanicznych i elektrycznych |
Takie oscylatory określa się skrótem OCXO (Oven Controlled Crystal Oscillators). Drugim popularnym rozwiązaniem w zakresie kompensacji wpływu zmian temperatury na stabilność rezonatora kwarcowego są tzw. układy TCXO (Temperature Compensated Oscillator). Wykorzystuje się w nich dwa główne komponenty: czujnik temperatury oraz blok tzw. VCXO (Voltage Controlled Crystal Oscillator), czyli oscylatora kwarcowego uzupełnionego o element o regulowanej reaktancji (rys. 11).
Zmieniając jego pojemność można wpływać na wartość częstotliwości rezonansowej oscylatora. W tym celu wykorzystuje się najczęściej diodę pojemnościową, a jako sygnał sterujący jej pojemnością - napięcie. Na rys. 12 przedstawiono schemat blokowy zegara RTC DS3231 firmy Maxim z magistralą I²C, częścią którego jest oscylator TCXO 32 kHz. Jego dokładność producent oszacował na ±2 ppm w zakresie temperatur od 0 do +40ºC oraz ±3,5 ppm w zakresie od -40 do +85ºC.
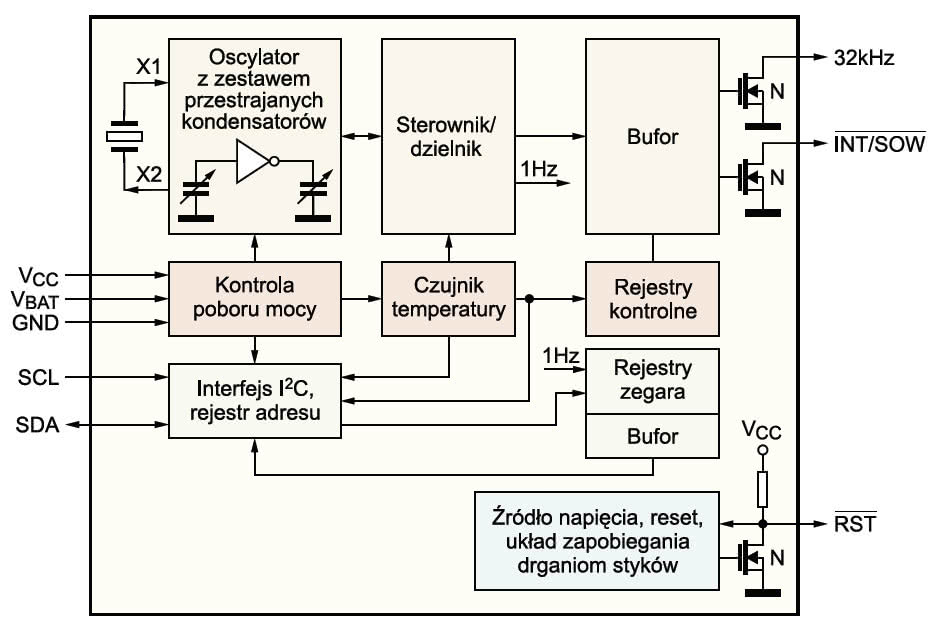
Rys. 12. Schemat blokowy układu DS3231 firmy Maxim |
Jak wynika z rys. 12 blok TCXO układu DS3231 składa się czujnika temperatury, układu oscylatora z zestawem przestrajanych kondensatorów oraz sterownika, który na podstawie zmierzonej temperatury z zapisanej w pamięci tablicy odczytuje odpowiadającą jej wartość pojemności. Dodatkowo uwzględniane są dane z rejestru kompensacji wpływu starzenia się kwarcu. Na tej podstawie ustalana jest wartość zapisywana następnie do rejestru wyboru kondensatorów. Częstotliwość rezonatora jest korygowana w momencie nagłej zmiany temperatury lub może ją zainicjować użytkownik.
Pętla fazowa
Oprócz TCXO oscylatory VCXO są też częścią układów z pętlą fazową (PLL). Ich zadaniem jest powielanie częstotliwości podstawowej drgań rezonatora w kilku określonych przedziałach. Sygnały taktujące generowane w ten sposób z jednego źródła, np. rezonatora kwarcowego o częstotliwości kilku MHz, doprowadza się do poszczególnych części systemu. Pętlę fazową zrealizować można na kilka sposobów. Jednym z nich jest skorzystanie z oddzielnych elementów. Wówczas oprócz VCXO częścią PLL są także: detektor fazy oraz filtr. Można też znaleźć gotowe układy łączące w sobie wszystkie wymagane elementy.
Rozwiązaniem pośrednim jest wykorzystanie układu ASIC lub FPGA, częścią którego jest detektor fazy i pompa ładunkowa, a często też dzielnik częstotliwości. Taką częściowo zintegrowaną pętlę fazową uzupełnić należy o zewnętrzny VCXO oraz odpowiednio dobrany filtr (rys. 13). Pętla fazowa nie we wszystkich aplikacjach jest rozwiązaniem optymalnym. Często na przeszkodzie w jej realizacji staje kwestia zwiększenia kosztów, dodatkowego poboru mocy lub pogorszenia precyzji sygnału taktującego, charakteryzowanej głównie za pomocą dwóch parametrów: szumu fazowego oraz jittera.
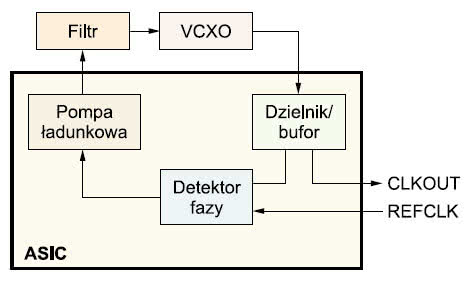
Rys. 13. PLL może być częściowo zintegrowana w ramach układu ASIC lub FPGA |
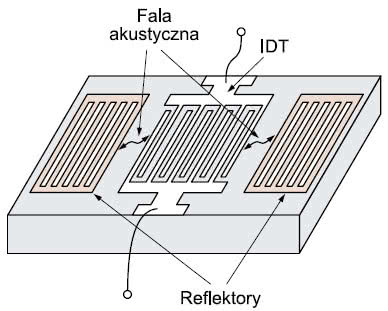
Rys. 14. Rezonator SAW |
W idealnym przypadku sinusoidalnego generatora częstotliwości taktowania cała moc sygnału powinna skupiać się na jednej częstotliwości. W praktyce jednak w takim sygnale wyodrębnić można szum, który rozprasza moc sygnału na inne częstotliwości, co skutkuje pojawieniem się wstęg bocznych w jego widmie. Do scharakteryzowania jakości sygnału taktującego w dziedzinie częstotliwości wykorzystuje się wspomniany szum fazowy, wyrażany zazwyczaj w dBc/Hz.
Parametr ten określa stosunek mocy sygnału o częstotliwości oddalonej o określony odstęp od częstotliwości rezonansowej oscylatora, do mocy sygnału o tej częstotliwości. Jitter z kolei jest wyznacznikiem jakości sygnału taktującego w dziedzinie czasu. Zazwyczaj wyraża się go w pikosekundach. Charakteryzuje on zmiany okresu sygnału taktującego w odniesieniu do przebiegu idealnego. W aplikacjach z układami ADC większy szum fazowy powoduje pogorszenie stosunku sygnału do szumu oraz zmniejszenie efektywnej liczby bitów, a tym samym rozdzielczości przetwornika.
Z kolei pogorszenie jitteru sygnału zegara ma szczególne znaczenie w transmisji danych z dużą prędkością, np. rzędu gigabitów, tzn. m.in. w komunikacji sieciowej oraz w przesyłaniu sygnału wideo dużej rozdzielczości. W aplikacjach tego typu sygnał zegara ze zbyt dużym jitterem skutkuje wzrostem współczynnika błędnych bitów (BER). Niestety, gdy częstotliwość z rezonatora jest zwielokrotniana z wykorzystaniem PLL szum fazowy sygnału wyjściowego rośnie, dokładnie o +20logM, gdzie M to mnożnik w danej pętli fazowej.
  |
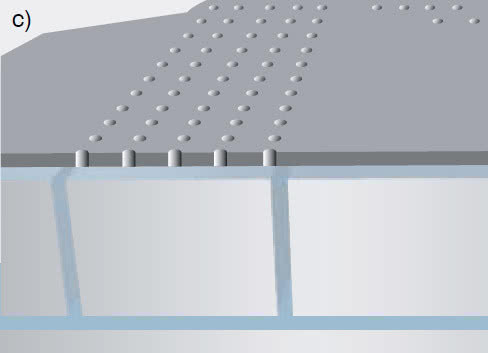 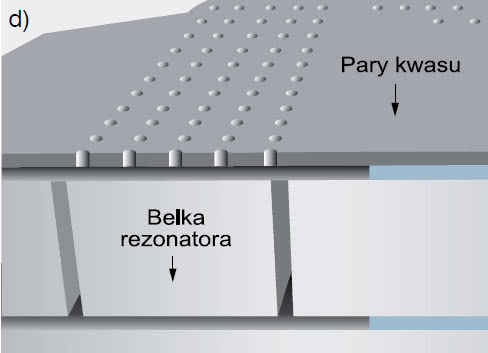 |
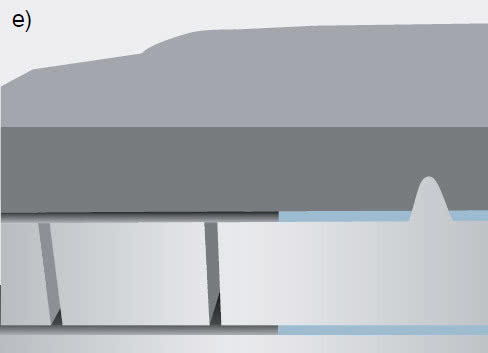 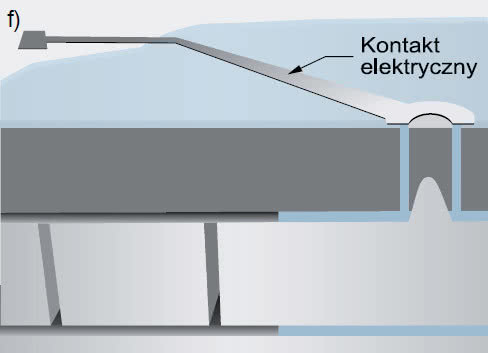
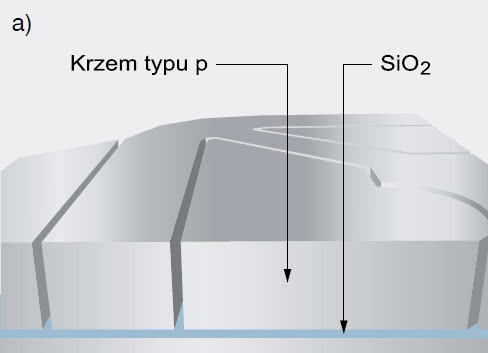
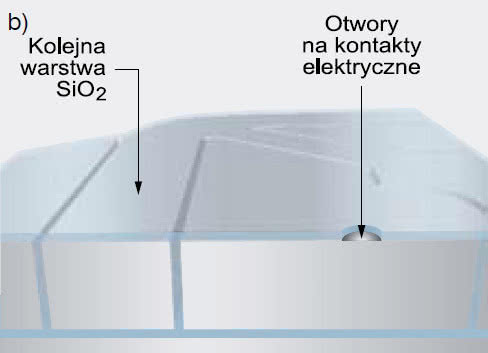
Rys. 15. Kolejne etapy produkcji rezonatora MEMSi |
PLL wpływa też na jitter przebiegu taktującego. Dominujący wpływ na jakość sygnału mają głównie szumy poszczególnych komponentów pętli, w tym filtrów oraz wzmacniacza oscylatora, jak również zakłócenia napięcia zasilającego oraz zakłócenia zewnętrzne. Newralgicznym punktem dla przenoszenia szumów na wyjście zegara jest połączenie filtru PLL z VCXO. Szumy, które tą drogą przenikną do pętli fazowej i pojawią się na wejściu VCXO zostaną wzmocnione. Problem ten staje się szczególnie dokuczliwy w przypadku częściowo zintegrowanych rozwiązań, w których elementem zewnętrznym są właśnie filtry.

















