Fairchild wprowadza na rynek nową serię modułów inercyjnych z fuzją danych FMT1000 zaprojektowanych dla producentów OEM. Mogą one znaleźć zastosowanie w dronach, pojazdach autonomicznych, pojazdach konstrukcyjnych i rolniczych, hełmach VR, kamerach czy systemach stabilizacji platform.
Zapewniają stabilny interfejs mechaniczny, elektryczny i programowy przez cały cykl życia produktu oraz nie wymagają od projektanta dużego doświadczenia w zakresie kalibracji systemów inercyjnych, cyfrowego przetwarzania sygnałów czy też algorytmów fuzji danych. Mogą być łatwo integrowane w systemie przy minimalnym nakładzie pracy (sprzętowym i programowym) z wykorzystaniem prostego protokołu komunikacyjnego, sterowników open-source oraz kodów źródłowych i przykładów integracji w systemach embedded wykorzystujących protokoły I²C/SPI/ARM mbed i środowisko projektowe dostępne w wersji dla Windows i Linux.
 |
 |
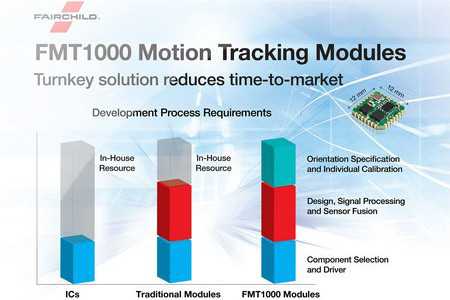
Moduły FMT1000 bazują na 6-osiowym czujniku inercyjnym MEMS o symbolu FIS1100, wprowadzonym wcześniej do oferty Fairchild. Wszystkie egzemplarze są w pełni testowane i kalibrowane na etapie produkcji w całym dopuszczalnym zakresie temperatur pracy, ograniczając do minimum nakład czasu i kosztów producenta OEM. Realizują zaawansowane algorytmy fuzji danych z wewnętrznych czujników wraz z autokalibracją i formatowaniem danych, odciążając dzięki temu zewnętrzny mikroprocesor. Dostarczają przestrzenne dane orientacyjne (kąty Eulera, matrycę rotacji, kwaterniony), przyrosty prędkości i położenia oraz dane z sensorów (przyspieszenie, szybkość obrotu, natężenie pola magnetycznego). Występują w trzech wariantach różniących się funkcjonalnością: FMT1010 (Inertial Measurement Unit), (FMT1020) Vertical Reference Unit (VRU) i FMT1030 (Attitude and Heading Reference System). Zapewniają dokładność pomiaru kątów Eulera na poziomie 3°. Są produkowane w postaci modułów SMD (PLCC-28) o wymiarach 12,1 x 12,1 x 2,6 mm
| FMT1010 IMU | FMT1020 VRU | FMT1030 AHRS | |
| Częstotliwość pomiaru danych inercyjnych | do 1000 Hz | do 1000 Hz | do 1000 Hz |
| Częstotliwość pomiaru pola magnetycznego | do 100 Hz | do 100 Hz | do 100 Hz |
| Osie roll/pitch | - | kwaterniony, kąty Eulera, matryca roitacji | kwaterniony, kąty Eulera, matryca roitacji |
| Śledzenie kierunku | - | Active Heading Stabilization | Active Heading Stabilization |
| Oś yaw | - | - | kwaterniony, kąty Eulera, matryca roitacji |
Więcej na: www.fairchild.com




