
Fale sejsmiczne to termin, który od razu kojarzy się z trzęsieniami ziemi. Są one skutkiem nagłego uwolnienia energii sprężystej nagromadzonej w skorupie ziemskiej. Najczęściej dochodzi do tego w wyniku ruchów płyt tektonicznych wzdłuż uskoków. Energia uwolniona w ognisku trzęsienia rozchodzi się we wnętrzu Ziemi oraz wzdłuż jej powierzchni w postaci fal sejsmicznych. Propagują one we wszystkich kierunkach od źródła i dzielą się na fale objętościowe (wgłębne) oraz fale powierzchniowe.
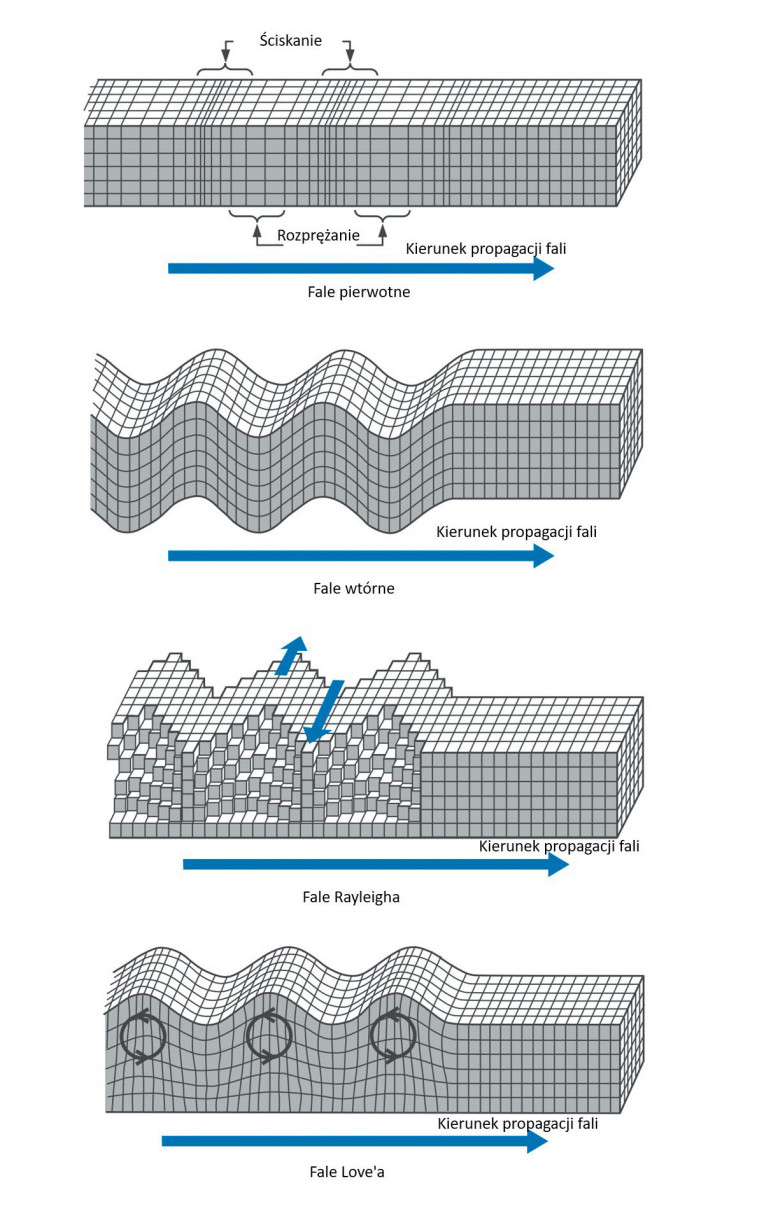
Fale objętościowe rozchodzą się wewnątrz ośrodka i dzielą się na fale pierwotne (podłużne, fale P) i wtórne (poprzeczne, fale S). Fale P powodują drgania cząstek ośrodka w kierunku równoległym do kierunku propagacji fali, wywołując naprzemienne ściskanie i rozprężanie skał. Są najszybszym typem fal sejsmicznych – ich prędkość wynosi od około 2 km/s w skałach przypowierzchniowych do około 8 km/s w głębszych warstwach skorupy ziemskiej, a w płaszczu może nawet przekroczyć 13 km/s. Fale P mogą rozchodzić się zarówno w ciałach stałych, jak i w cieczach oraz gazach. Ze względu na stosunkowo niewielkie amplitudy drgań powodują zazwyczaj mniejsze zniszczenia niż inne typy fal sejsmicznych.
Po falach P docierają fale S, które wywołują drgania cząstek ośrodka w kierunku prostopadłym do kierunku propagacji fali. Są one wolniejsze od fal P – ich prędkość wynosi zazwyczaj około 60‒70% prędkości fal P w tym samym ośrodku. Fale S rozchodzą się wyłącznie w ciałach stałych, ponieważ do ich propagacji wymagany jest ośrodek mogący przenosić naprężenia ścinające. Ze względu na poprzeczny charakter drgań i zwykle większe amplitudy powodują większe deformacje ośrodka niż fale P, przez co mogą być bardziej destrukcyjne.
Fale powierzchniowe rozchodzą się wzdłuż powierzchni Ziemi i charakteryzują się prędkościami mniejszymi niż fale objętościowe, typowo są 10‒30% wolniejsze od fal S. Ich prędkość zależy od właściwości mechanicznych ośrodka, takich jak gęstość i moduł sprężystości. Osiągają największe amplitudy przy powierzchni, przez co są najbardziej niszczącym typem fal sejsmicznych. Wyróżnia się dwa podstawowe rodzaje fal powierzchniowych: fale Rayleigha, w których ruch cząstek ma charakter eliptyczny w płaszczyźnie pionowej i fale Love’a, w których drgania zachodzą poziomo, prostopadle do kierunku propagacji fali (rys. 1).
Inne źródła fal
Fale sejsmiczne nie muszą być skutkiem trzęsienia ziemi. W rzeczywistości każda zmienna w czasie siła przyłożona do gruntu może generować fale sprężyste propagujące w ośrodku, nawet jeżeli ich amplituda jest bardzo mała. Przykładem takiego wymuszenia jest chodzenie, w czasie którego powtarzające się uderzenia stóp o podłoże generują prawie periodyczne siły dynamiczne. Impulsy te powodują lokalne deformacje podłoża i wzbudzają fale sejsmiczne o parametrach zależnych od masy ciała chodzącego, prędkości jego przemieszczania się i właściwości mechanicznych ośrodka. Widmo tych fal obejmuje częstotliwość kroku, przeważnie w zakresie od około 1 do 3 Hz oraz jej harmoniczne.
Zatem oprócz przyczyn naturalnych, fale sejsmiczne mogą być konsekwencją działań człowieka. Poza chodzeniem ich źródłem może być także ruch samochodów, wojskowych wozów bojowych, praca maszyn budowlanych, eksplozje podczas wykonywanie odwiertów do wydobycia surowców. Fale te ze względu na ich amplitudę określa się jako mikrosejsmiczne.
W przypadku pojazdów źródło wzbudzenia stanowi dynamiczna interakcja komponentów układu napędowego, zawieszenia, kół lub gąsienic z podłożem. Oddziaływanie to prowadzi do powstawania zmiennych w czasie sił kontaktowych, które generują fale sprężyste propagujące w gruncie. Przemieszczający się pojazd może zostać przedstawiony jako układ ruchomych obciążeń, które oddziałują na ośrodek, w tym przypadku nawierzchnię drogi i grunt pod nią, zamodelowane jako belka lub płyta na podłożu sprężystym albo lepko-sprężystym. W zaawansowanych modelach grunt przedstawiany jest jako ośrodek wielowarstwowy o właściwościach lepko-sprężystych, który tłumi energię fal sejsmicznych poprzez mechanizmy jej rozpraszania i pochłaniania w materiale.
Kontakt pojazdu z nierównościami nawierzchni prowadzi do powstawania obciążeń dynamicznych oddziałujących na podłoże. W przypadku nagłego kontaktu koła z przeszkodą, taką jak pęknięcie nawierzchni, nierówna pokrywa studzienki kanalizacyjnej lub ubytek nawierzchni, powstaje obciążenie udarowe. Ma ono charakter impulsowy i generuje fale sejsmiczne o szerokim widmie częstotliwości. Składowe tego widma odpowiadające częstotliwościom własnym gruntu mogą ulec selektywnemu wzmocnieniu na skutek zjawiska rezonansu. Po impulsie udarowym następuje jeszcze odpowiedź układu zawieszenia pojazdu (podskok jego osi), która stanowi przykład wymuszenia oscylacyjnego. Wzbudzenie to zachodzi przy częstotliwości własnej układu zawieszenia, typowo w zakresie od około 1 do kilkunastu herców i prowadzi do powstania fal sejsmicznych o wąskim widmie częstotliwości.
W przeciwieństwie do pojedynczych, izolowanych nierówności nawierzchni, typowa chropowatość drogi powoduje ciągłe zmiany siły kontaktowej między kołem pojazdu a podłożem. W rezultacie na grunt działa zmienne w czasie obciążenie dynamiczne, które może być nieregularne lub częściowo okresowe. Jeżeli nierówności nawierzchni mają charakter powtarzalny, na przykład w postaci serii podobnych zagłębień lub wybrzuszeń, wówczas ruch pojazdu, którego koła podlegają okresowym pionowym przemieszczeniom powoduje powstawanie cyklicznego wymuszenia dynamicznego. Jego częstotliwość zależy od prędkości pojazdu oraz od odległości pomiędzy kolejnymi nierównościami. Im szybciej jedzie pojazd albo im mniejsza jest odległość pomiędzy nierównościami, tym wyższa będzie częstotliwość generowanych drgań. Jeżeli częstotliwość wymuszenia jest zbliżona do jednej z częstotliwości własnych gruntu może dojść do rezonansowego wzmocnienia amplitudy drgań. Opisywanego zjawiska można doświadczyć na drogach gruntowych i żwirowych, o nawierzchni, która ze względu na regularne, powtarzalne nierówności przypomina tarkę.

Pomiary fal sejsmicznych
Ruch gruntu wywołany falą sejsmiczną opisuje się za pomocą trzech wielkości: przemieszczenia, prędkości i przyspieszenia. Przemieszczenie określa zmianę położenia punktu ośrodka względem jego położenia początkowego, prędkość – szybkość tej zmiany w czasie, natomiast przyspieszenie – tempo zmian prędkości. Spośród tych wielkości szczególnie istotne w analizie oddziaływania fal sejsmicznych jest przyspieszenie, gdyż bezpośrednio wiąże się z siłami bezwładności działającymi na obiekty.
Pierwsze czujniki sejsmiczne mierzyły jedynie względne przemieszczenie między dwoma punktami ośrodka. W tym celu wykorzystywano na przykład pręty umieszczane w otworach wywierconych w gruncie, których odkształcenie pod wpływem ruchów gruntu było mierzone przez przymocowane do nich tensometry. Sensory te miały wysoką czułość. Sprawdzały się jednak głównie w pomiarach wolno postępujących deformacji skorupy ziemskiej, jak ruchy tektoniczne w okolicy uskoków i wulkanów, ale ich możliwości w zakresie rejestracji fal sejsmicznych o wyższych częstotliwościach były ograniczone. Z czasem rozwój technologii doprowadził do opracowania sensorów inercyjnych, które mierzą ruch gruntu względem układu odniesienia związanego z masą bezwładną zawieszoną na sprężystym elemencie. Drgania podłoża powodują względny ruch masy, który jest przetwarzany przez przetworniki elektromechaniczne na sygnał elektryczny proporcjonalny do przemieszczenia lub prędkości drgań.
Generalnie czujniki sejsmiczne do pomiaru drgań gruntu spowodowanych trzęsieniem ziemi muszą być w stanie rejestrować sygnały o niskich częstotliwościach i dużych amplitudach. Z kolei sensory do pomiaru drgań, których źródłem jest człowiek, są zwykle zoptymalizowane pod kątem wyższych częstotliwości i mniejszych amplitud sygnałów mierzonych, typowych dla drgań generowanych w wyniku ruchu pojazdów i pracy maszyn. Przykładowo do pomiarów silnych drgań gruntu na skutek trzęsień ziemi wykorzystuje się akcelerometry z równoważeniem siły. W czujnikach tego rodzaju położenie masy bezwładnej jest stabilizowane przez układ sprzężenia zwrotnego, który generuje siłę równoważącą jej przemieszczenie.
Najnowsze rozwiązania w dziedzinie sensorów sejsmicznych obejmują geofony oraz czujniki przyspieszenia wykonane w technologii mikroelektromechanicznej (MEMS). Wyróżniają je niewielkie rozmiary, niskie koszty i możliwość zorganizowania w oparciu o nie rozproszonych systemów pomiarowych, pozwalających na monitorowanie większego obszaru.
Geofony i czujniki MEMS
Geofony to przyrządy o ugruntowanej pozycji w dziedzinie pomiarów sejsmicznych, wciąż cieszące się popularnością ze względu na prostą konstrukcję i niezawodność. Na rys. 2 przedstawiono ich główne komponenty. Są to: obudowa, zaznaczona na niebiesko, przymocowana do szpikulca (kolca, zaznaczonego na szaro), który po wbiciu w ziemię zapewnia sprzężenie mechaniczne czujnika z podłożem, magnes trwały (żółty), cewkę (czerwoną) oraz sprężynę (czarną). Obudowa geofonu jest mechanicznie sprzężona z gruntem, z kolei cewka jest zawieszona sprężyście wewnątrz obudowy i wraz z elementami konstrukcyjnymi, do których jest przymocowana, stanowi masę bezwładną układu pomiarowego.
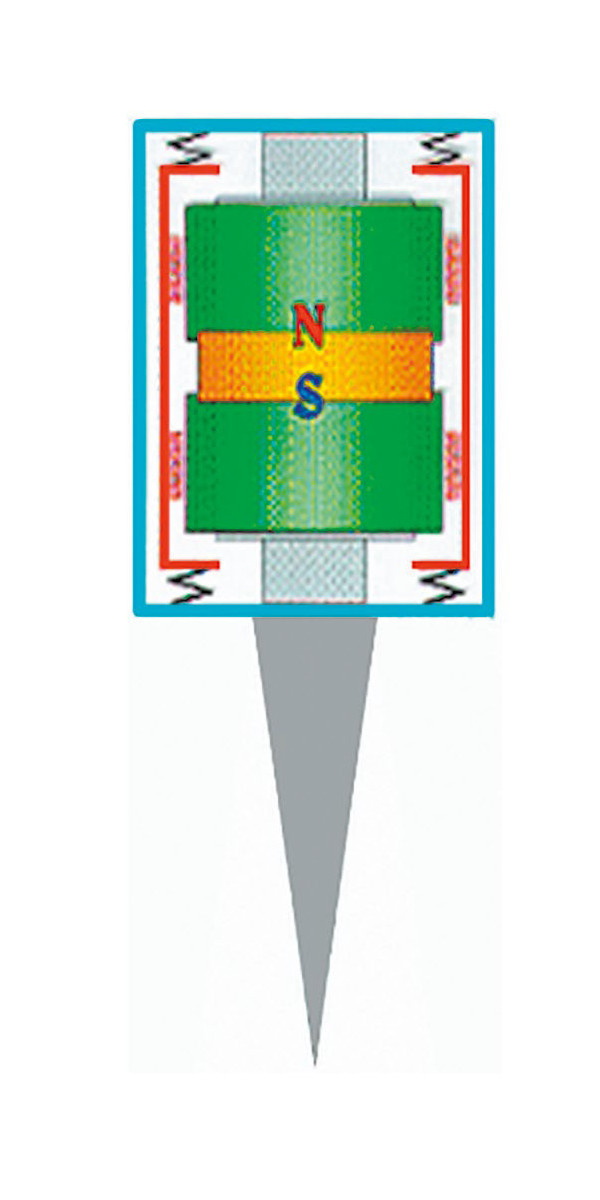
Podczas drgań gruntu obudowa oraz magnes poruszają się wraz z nim, natomiast cewka, z powodu swojej bezwładności, przemieszcza się względem magnesu. W efekcie, zgodnie z prawem indukcji elektromagnetycznej Faradaya, powstaje siła elektromotoryczna, a napięcie wyjściowe geofonu jest proporcjonalne do względnej prędkości ruchu cewki względem magnesu, a zatem i do prędkości drgań gruntu.
Na rys. 3 przedstawiono charakterystykę czułości napięciowej geofonu, definiowanej jako stosunek jego napięcia wyjściowego do prędkości drgań podłoża, w funkcji częstotliwości. Idealnie czujnik sejsmiczny powinien charakteryzować się płaską charakterystyką, czyli równie wysoką czułością w całym wymaganym paśmie. W praktyce jednak odpowiedź częstotliwościowa wykazuje maksimum w pobliżu częstotliwości rezonansowej geofonu (zawieszenia masy bezwładnej), która w typowych konstrukcjach czujników tego typu wynosi około 10 Hz, choć dostępne są też geofony o niższych częstotliwościach własnych w przedziale 1–5 Hz. W celu spłaszczenia krzywej czułości wokół częstotliwości drgań własnych dodaje się odpowiednio dobrany rezystor obciążenia, co prowadzi do zmniejszenia dobroci układu i ograniczenia efektów rezonansowych.
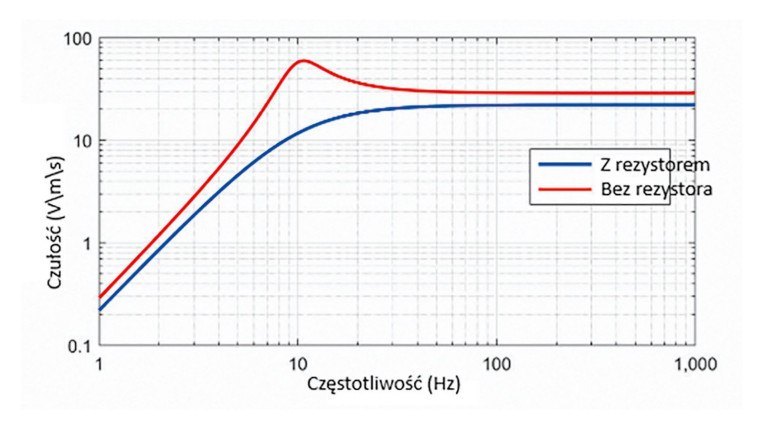
Częstotliwość rezonansowa wyznacza w praktyce dolną granicę użytecznego pasma przenoszenia geofonu, poniżej której jego czułość gwałtownie maleje, ponieważ ruch względny masy bezwładnej względem obudowy staje się pomijalnie mały. Górna granica pasma jest z kolei ograniczona przez tzw. częstotliwość fałszywą, wynikającą z niepożądanych rezonansów elementów konstrukcyjnych, jak sprężyny, wyprowadzenia cewki, elementy mocujące, przy której odpowiedź czujnika jest zafałszowana i nie odpowiada rzeczywistym drganiami gruntu. Generalnie, im niższa częstotliwość własna geofonu, tym niższa jest częstotliwość fałszywa.
Korzysta się, chociaż rzadziej, z geofonów GAC (Geophone Accelerometer), przeznaczonych do bezpośredniego pomiaru przyspieszenia drgań gruntu, o szerszym paśmie oraz większej czułości w zakresie niskich częstotliwości w porównaniu do klasycznych geofonów. W GAC wprowadza się obwód sprzężenia zwrotnego, który generuje prąd w cewce w taki sposób, aby przeciwdziałać jej ruchowi względem magnesu. Siła kompensująca, która jest wymagana do jej unieruchomienia jest proporcjonalna do przyspieszenia.
Czujniki sejsmiczne MEMS, w których masa bezwładna jest zintegrowana z torem pomiarowym na wspólnym podłożu, wyróżniają małe wymiary, niski pobór mocy i możliwość masowej produkcji przy zachowaniu wysokiej powtarzalności parametrów. Masa bezwładna zawieszona jest na elastycznych sprężynach. Podczas przyspieszenia obudowy czujnika w wyniku ruchu gruntu masa ta ulega względnemu przemieszczeniu na skutek działania siły bezwładności. Jest ono proporcjonalne do przyspieszenia i powoduje zmianę mierzalnego parametru fizycznego, najczęściej pojemności elektrycznej w układzie elektrod tworzących kondensator różnicowy. Jej zmiana jest przetwarzana przez zintegrowany układ elektroniczny na sygnał napięciowy proporcjonalny do przyspieszenia drgań gruntu. Charakterystyka częstotliwościowa czujników sejsmicznych MEMS zależy od parametrów mechanicznych struktury mikromechanicznej, w szczególności masy bezwładnej, a zwłaszcza sztywności jej zawieszenia. Ich odpowiedni dobór pozwala uzyskać szerokie pasmo przenoszenia, obejmujące zarówno niskie częstotliwości charakterystyczne dla fal sejsmicznych pochodzenia naturalnego, jak i wyższe częstotliwości drgań generowanych w wyniku działalności człowieka. W porównaniu z klasycznymi geofonami sensory MEMS pozwalają na bezpośredni pomiar przyspieszenia, bez konieczności wprowadzania dodatkowych rozwiązań.
Systemy detekcji obiektów
Detekcja obiektów na podstawie sygnałów z czujników sejsmicznych może być zrealizowana na różnych poziomach. Na najbardziej podstawowym polega na określeniu tylko czy zmierzony sygnał wskazuje na obecność obiektu w monitorowanym obszarze, czy zarejestrowany został jedynie szum środowiskowy. W bardziej zaawansowanych systemach przeprowadzana jest klasyfikacja obiektów, to znaczy na podstawie analizy charakterystyki sygnału pomiarowego określany jest typ jego źródła na przykład człowiek, pojazd kołowy lub pojazd gąsienicowy. Na jeszcze wyższym poziomie obiekt zostaje zlokalizowany. Najbardziej zaawansowane systemy pozwalają natomiast na śledzenie źródła drgań. W takim przypadku położenie obiektu jest monitorowane w sposób ciągły i wyznaczana jest trajektoria jego ruchu.
Przetwarzanie danych pomiarowych w systemach detekcji sejsmicznej obejmuje kilka etapów, w tym filtrację, ekstrakcję cech i klasyfikację. Filtracja ma na celu usunięcie zakłóceń i przekazanie do dalszej analizy tylko interesujących składowych sygnału pomiarowego. Następnie wyodrębnia się z niego cechy charakterystyczne, jak amplituda, widmo częstotliwościowe albo charakterystyki czasowe. W oparciu o nie, coraz częściej wykorzystując algorytmy uczenia maszynowego, można określić, czy sygnał pochodzi od rzeczywistego obiektu, a następnie sklasyfikować jego typ. W systemach wykorzystujących wiele czujników możliwe jest również określenie jego położenia na podstawie różnic czasów dotarcia sygnałów z poszczególnych sensorów.
Na wiarygodność detekcji wpływ ma wiele czynników. Do najważniejszych należą właściwości gruntu, przede wszystkim jego struktura, wilgotność oraz gęstość, które wpływają na propagację fal sejsmicznych. Ponadto ważne jest rozmieszczenie czujników, ich czułość i wykorzystane algorytmy przetwarzania sygnałów.

Zastosowania wojskowe i cywilne
Systemy detekcji obiektów oparte na czujnikach sejsmicznych mają wiele zastosowań w wojsku, ochronie infrastruktury krytycznej oraz w cywilnych systemach bezpieczeństwa. Wojsko korzysta z nich m.in. w monitorowaniu pola walki, w celu wykrycia ruchów piechoty i przemieszczania się pojazdów przeciwnika, jak również w ochronie granic i baz wojskowych. W tych zastosowaniach ich zaletą jest to, że umożliwiają wykrywanie obiektów bez konieczności bezpośredniej obserwacji, co ma szczególne znaczenie w warunkach ograniczonej widoczności oraz w obecności przeszkód terenowych. Nie bez znaczenia jest też możliwość ich łatwego zamaskowania.
W czujniki sejsmiczne wyposażane są m.in. projektowane na potrzeby armii bezobsługowe czujniki naziemne UGS (Unattended Ground Sensors). Ich konstrukcja jest zoptymalizowana pod kątem wagi i rozmiarów, które na polu walki są czynnikami krytycznymi. UGS wyposaża się w jednostki obróbki danych oraz moduły komunikacyjne. Zaawansowane algorytmy przetwarzania wyników pomiarów pozwalają na klasyfikowanie wykrytych obiektów na ludzi i pojazdy, przy jednoczesnym filtrowaniu fałszywych alarmów. Zaszyfrowane dane są następnie przesyłane do stacji bazowej, a w przypadku aktywacji trybu ciszy radiowej lub przerwania komunikacji, są przechowywane w UGS do momentu otrzymania żądania ich przesłania albo ponownego nawiązania połączenia. Zwykle każdy taki sensor może pracować jako węzeł w sieci mesh i w razie potrzeby przekazywać dane z innych bezobsługowych czujników naziemnych do stacji bazowej.
Natomiast w zastosowaniach cywilnych sejsmiczne systemy detekcji są wykorzystywane do ochrony m.in. rurociągów, obiektów energetycznych i innych zaliczanych do infrastruktury krytycznej, monitorowaniu ruchu na autostradach. Korzysta się z nich również w ochronie perymetrycznej budynków oraz prywatnych posesji.
Monika Jaworowska











