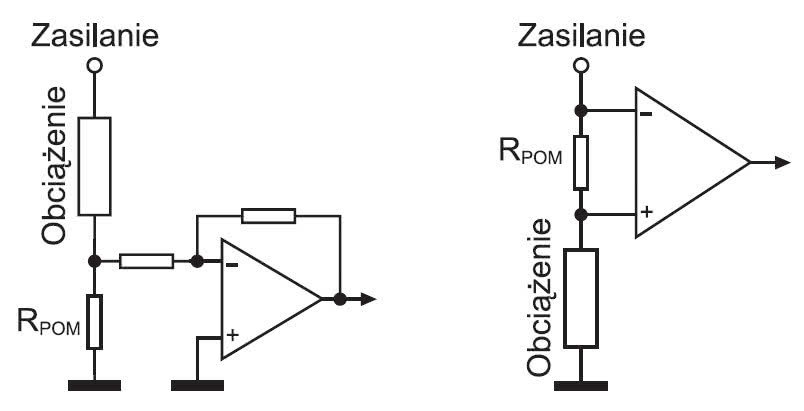
Rys. 1. Uproszczony schemat czujników prądu w konfiguracji a) low-side i b) high-side
Konfiguracja low-side ma jednak dwie wady: nie gwarantuje wykrycia zwarcia oraz sprzyja powstawaniu różnic napięcia w obwodzie masy, co jest nie do zaakceptowania w niektórych aplikacjach. Przykład takiej sytuacji pokazano na rysunku 2, przedstawiającym schemat kontrolera ładowania akumulatorów z czujnikiem natężenia prądu w konfiguracji low-side. W układzie tym zmiana napięcia na rezystorze RPOM wpływa na potencjał ujemnego zacisku akumulatora, względem którego mierzone jest napięcie na termistorze badającym temperaturę akumulatora. W rezultacie wyniki pomiaru temperatury przesyłane do układu kontrolnego są nieprecyzyjne i uniemożliwiają poprawne monitorowanie pracy całego urządzenia.
Scalone wzmacniacze high-side
W układach high-side rezystor pomiarowy jest umieszczany między zasilaniem i obciążeniem (rys. 1 b), dlatego nie występują tu ograniczenia charakterystyczne dla konfiguracji low-side. Jednak oczekiwania wobec parametrów wzmacniaczy pomiarowych w układach high-side są znacznie wyższe.
Ważna jest tu dostatecznie duża wartość współczynnika CMRR oraz odpowiednio szeroki dopuszczalny zakres wejściowych napięć sumacyjnych, ponieważ w konfiguracji high-side napięcie na rezystorze jest zbliżone do napięcia zasilającego. W zależności od aplikacji mogą to być pojedyncze wolty, np. w przypadku rdzeni mikroprocesorów lub nawet setki woltów w urządzeniach przemysłowych, telekomunikacyjnych i elektronice samochodowej.
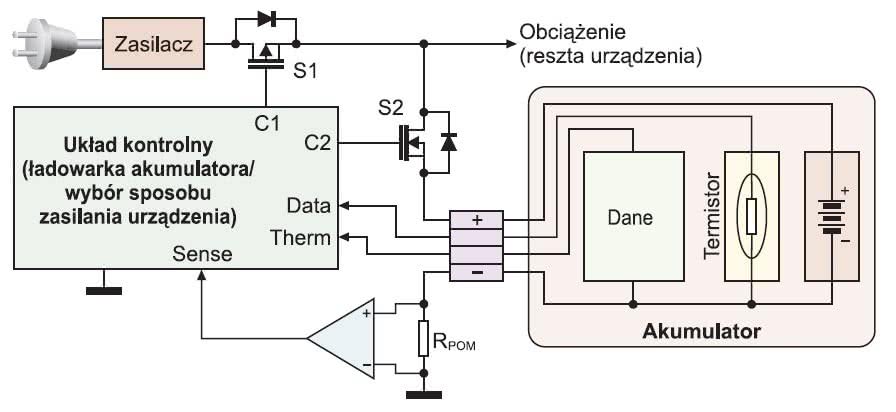
Rys. 2. Kontroler ładowania akumulatorów z czujnikiem natężenia prądu w konfiguracji low-side
Najprostszym rozwiązaniem tego problemu wydaje się przeskalowanie napięcia za pomocą dzielnika rezystancyjnego do wartości, która będzie się mieścić w zakresie dopuszczalnych wejściowych napięć wspólnych danego wzmacniacza operacyjnego. Takie rozwiązanie z wykorzystaniem elementów dyskretnych nie jest jednak optymalne, ponieważ dodatkowe komponenty zajmują miejsce na płytce, zwiększają koszt konstrukcji, a przede wszystkim obniżają dokładność pomiarów.
Na rynku pojawiły się specjalizowane układy scalone, przeznaczone do pomiaru natężenia prądu w konfiguracji high-side. Można tu wyróżnić dwie grupy produktów: wzmacniacze różnicowe oraz tzw. wzmacniacze current-sense. Ich budowę i zasadę działania omówimy na przykładzie dwóch wysokonapięciowych wzmacniaczy firmy Analog Devices: AD8206 i AD8210.
Wzmacniacze pomiarowe ADI
Na rysunku 3 przedstawiono uproszczony schemat wzmacniacza AD8206. Jego najważniejszymi komponentami są wzmacniacze W1 i W2 oraz dzielnik rezystancyjny zbudowany z elementów RA, RB i RC. Dzielnik ten ogranicza napięcie wspólne sygnału wejściowego w stosunku 1:16,7, tak by mieściło się ono w zakresie dopuszczalnych napięć wzmacniacza W1.
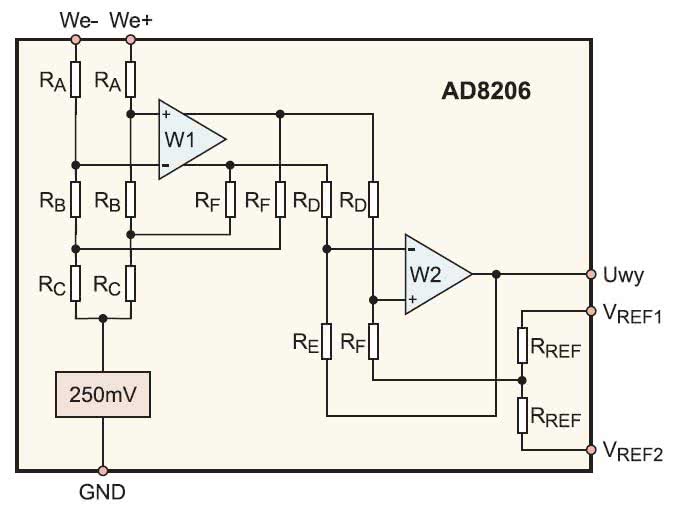
Rys. 3. Uproszczony schemat wzmacniacza AD8206
Dodatkowo, dzięki wykorzystaniu źródła referencyjnego 250mV wzmacniacz może pracować przy ujemnych wartościach napięć wspólnych. Ostatecznie zakres wejściowych napięć sumacyjnych AD8206 wynosi od –2V do +65V przy napięciu zasilania 5V. W związku z tym, że oprócz składowej wspólnej dzielnik napięcia skaluje też napięcie różnicowe będące w tym wypadku sygnałem pomiarowym, wzmocnienie wzmacniaczy musi być tak dobrane, by to tłumienie skompensować i uzyskać założone wzmocnienie całego układu.
W tym wypadku wzmocnienie W1 i W2 wynosi odpowiednio 26 i 12,86 V/V, co z uwzględnieniem tłumienia na wejściu układu zapewnia całkowite wzmocnienie AD8206 o wartości 20V/V. Współczynnik CMRR typowo wynosi 80dB, co uzyskano dzięki precyzyjnie dobranym wartościom trymowanych laserowo rezystorów RA, RB, RC, RD i RF, wykonanych z dokładnością 0,01%.
W AD8206 przewidziano też możliwość korekcji off setu, za pośrednictwem wyprowadzeń VREF1 i VREF2 połączonych z wejściem wzmacniacza W2. Na rysunku 4 przedstawiono schemat wzmacniacza current-sense AD8210. Składa się on z dwóch głównych bloków: wzmacniacza różnicowego (W1) oraz pomiarowego (W2). Najważniejszą różnicą w stosunku do AD8206 jest brak wejściowego dzielnika napięciowego.
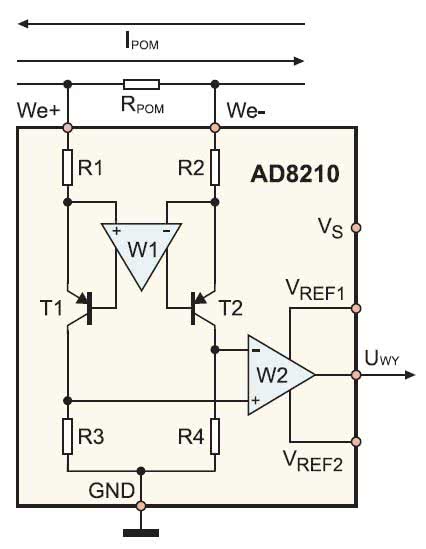
Rys. 4. Uproszony schemat wzmacniacza
AD8210
W tym wypadku szeroki zakres wejściowych napięć wspólnych (również od –2V do +65V przy napięciu zasilania 5V) uzyskuje się dzięki wykorzystaniu wysokonapięciowych tranzystorów T1 i T2. Wejściowe zaciski AD8210 są połączone ze wzmacniaczem W1 przez rezystory R1 i R2. Na podstawie sygnału wejściowego W1 reguluje prąd przepływający przez R1 i R2, sterując w tym celu tranzystorami T1 i T2. Na przykład, gdy napięcie różnicowe na zaciskach wejściowych wzmacniacza W1 wynosi 0V, prądy płynące w gałęzi z R1 i R2 są równe.
W pozostałych przypadkach natężenie prądu w jednej gałęzi rośnie, a w drugiej maleje, przy czym ich różnica jest proporcjonalna do sygnału wejściowego W1. Przepływ tych prądów wywołuje spadki napięć na rezystorach R3 i R4. Ich różnica jest dalej przetwarzana w W2. Wzmocnienie całego układu, podobnie jak wcześniej opisywanego AD8206, wynosi 20V/V. Dodatkowo, w AD8210 także uwzględniono możliwość regulacji off setu (wyprowadzenia VREF1 i VREF2).
Porównanie
Jak wynika z powyższego opisu, niektóre parametry obu typów wzmacniaczy są porównywalne. Układy te działają jednak w zupełnie inny sposób: wzmacniacz AD8206 przeskalowuje wysokie napięcie wejściowe w dzielniku, natomiast wzmacniacz current-sense najpierw przetwarza wejściowe napięcie na prąd, a następnie realizuje operację odwrotną. W praktyce często decyduje to o możliwości zastosowania danego wzmacniacza w określonej aplikacji.
Rys. 5. Tranzystory PMOS chronią wzmacniacz current-sense przed
ujemnym napięciem sumacyjnym na wejściu RS, które mogłoby
spowodować przepływ dużego prądu przez diody zabezpieczające
i uszkodzić wzmacniacz
Konstrukcja wzmacniacza ma wpływ na jego pasmo przenoszenia. Ze względu na tłumienie sygnału wejściowego, pasmo wzmacniaczy różnicowych jest zazwyczaj kilkukrotnie węższe niż w przypadku wzmacniaczy current-sense (100 kHz dla AD8206, 450 kHz dla AD8210). Konstrukcja wpływa też na możliwości tłumienia składowej sumacyjnej napięcia wejściowego.
W przypadku wzmacniaczy różnicowych, tolerancja rezystorów wejściowych wynosi zazwyczaj 0,01%, co zapewnia współczynnik CMRR na poziomie 80dB (DC). W wypadku wzmacniaczy current-sense tłumienie składowej sumacyjnej nie zależy od wartości rezystancji, ponieważ w stopniu wejściowym wykorzystywane są tranzystory.
Dzięki temu w układach tego typu uzyskuje się współczynnik CMRR o wartościach przekraczających 100dB (DC). W przypadku AD8210 jest to typowo 120dB, z wyjątkiem niskich wartości napięć wspólnych. W zakresie wejściowych napięć wspólnych poniżej 5V, CMRR przy DC maleje do 80dB, ponieważ włącza się wówczas dodatkowy układ z rezystorami.
Ich dokładność determinuje wartość współczynnika CMRR, podobnie jak w przypadku AD8206. Układ ten nie był wcześniej omawiany, ale jego głównym zadaniem jest umożliwienie pracy wzmacniacza w zakresie ujemnych napięć wejściowych. Ogólnie jednak, poza tą wyjątkową sytuacją, przyjmuje się, że wzmacniacze current-sense zapewniają lepsze możliwości w zakresie tłumienia składowej sumacyjnej od wzmacniaczy różnicowych.
Wpływ filtrów napięcia pomiarowego na parametry wzmacniaczy

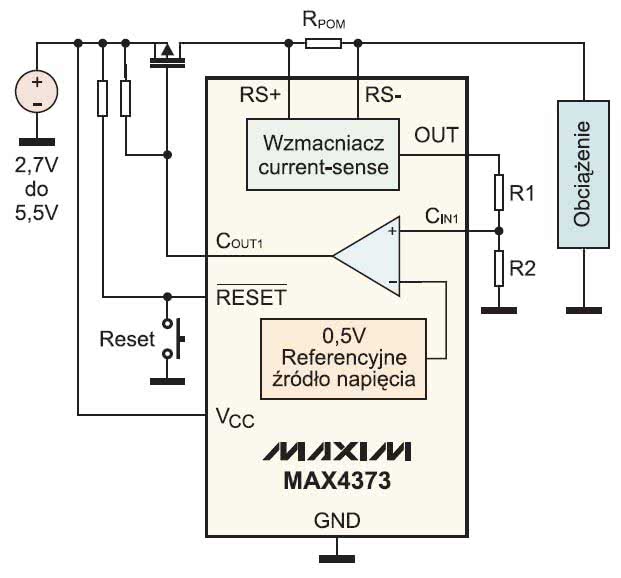
Rys. 6. Czujnik prądu MAX4373 w układzie zabezpieczającym przed
zwarciem lub przeciążeniem
W przypadku, gdy zachodzi potrzeba filtrowania napięcia na rezystorze pomiarowym, dodatkowy filtr w mniejszym stopniu pogarsza parametry pracy wzmacniaczy różnicowych. Znajduje to odzwierciedlenie w wartości dwóch parametrów, błędu wzmocnienia i błędu CMR, wyznaczanych z następujących zależności:
Błąd wzmocnienia (%)= 100-100 RWE/(RWE+RF)
Błąd wzmocnienia (%)= 20log (2RF∙tol)/RWE
gdzie RWE – rezystancja wejściowa wzmacniacza, RF – rezystancja filtru, a „tol” – tolerancja wykonania rezystorów filtru.
W przypadku wzmacniaczy różnicowych rezystancja wejściowa zazwyczaj przekracza 100kΩ. Jeżeli w takim wypadku zostanie wykorzystany filtr z rezystorami o wartości nawet kilkuset omów, dodatkowy błąd wzmocnienia nie przekroczy 1%. W niewielkim stopniu wpłynie to też na współczynnik CMR.
W przypadku wzmacniaczy current-sense, rezystancja wejściowa jest znacznie niższa i zazwyczaj nie przekracza 5Ω (w przypadku AD8210 wynosi 2kΩ). W związku z tym dodatkowy błąd wzmocnienia w tym przypadku wyniesie kilka procent. Filtr na wejściu wzmacniacza spowoduje także spadek CMR do 59dB (przy RF = 200Ω i tol = 1%).
W związku z tym, wykorzystując filtr wejściowy w połączeniu ze wzmacniaczem current-sense, zaleca się zmniejszenie rezystancji filtru do kilku omów. Wówczas można mieć pewność, że parametry wzmacniacza current-sense mimo włączenia filtru zostaną zachowane. W przypadku wzmacniaczy różnicowych, ograniczenia odnośnie do zakresu rezystancji filtru nie są konieczne.
Zabezpieczenia przed ujemnym napięciem

Rys. 7. Sterownik hot-swap MAX5933
Większa odporność na napięcia wejściowe przekraczające dopuszczalny zakres charakteryzuje wzmacniacze różnicowe. Ze względu na konstrukcję są one bardziej wytrzymałe i istnieje większe prawdopodobieństwo, że w takiej sytuacji nie ulegną uszkodzeniu. Wzmacniacze current-sense są pod tym względem mniej odporne i dlatego wyposaża się je w dodatkowe diody zabezpieczające.
Problemem bywa też pojawienie się na wejściu wzmacniacza napięcia ujemnego, np. w wyniku odwrotnego podłączenia zasilania, co należy brać pod uwagę m.in. w urządzeniach elektroniki samochodowej. Rozważmy tu przykład wzmacniacza current-sense MAX4080 firmy Maxim (rys. 5). Gdy napięcie wspólne między zaciskami RS+ i RS– spadnie znacznie poniżej 0V, przez wewnętrzne diody ESD, D1 lub D2 popłynie prąd o dużym natężeniu, mogący spowodować zniszczenie wzmacniacza.
Jednym z rozwiązań zabezpieczających przed taką sytuacją jest podłączenie dodatkowych zewnętrznych diod między rezystorem pomiarowym i wejściami RS+/RS–. Nie jest to jednak dobre rozwiązanie, ponieważ w czasie normalnych warunków pracy nawet minimalne różnice między napięciami przewodzenia obu diod mogą znacząco pogorszyć charakterystykę wejściową wzmacniacza.
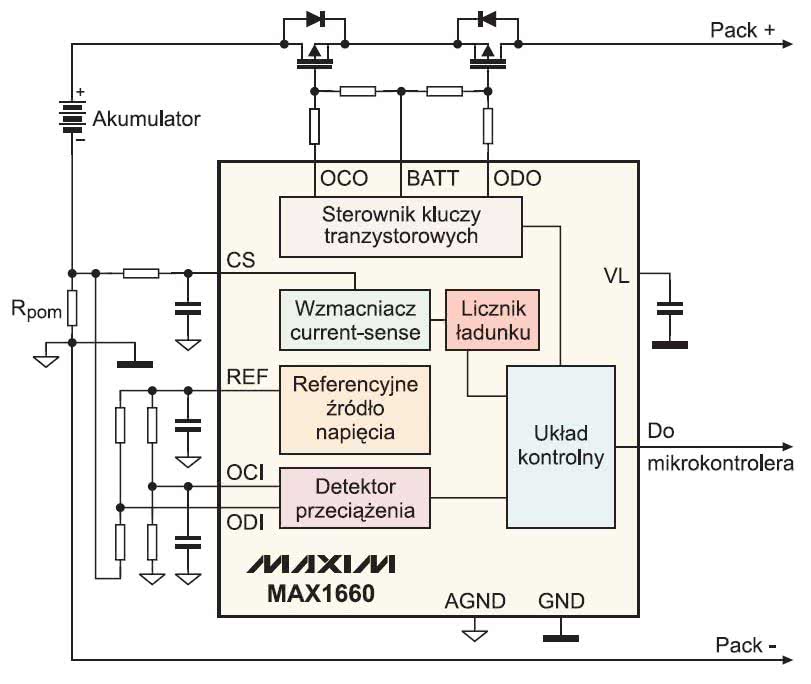
Rys. 8. Wskaźnik naładowania akumulatora z MAX1660
Lepszym rozwiązaniem jest włączenie tranzystorów PMOS w taki sposób, jak to przedstawiono na rysunku 5. Kiedy napięcie sumacyjne jest ujemne, tranzystory wyłączają się, co w praktyce odpowiada wprowadzeniu diody zwrotnej między rezystor pomiarowy i zaciski wejściowe wzmacniacza. W ten sposób zapobiega się włączeniu wewnętrznej diody ESD.
Gdy napięcie wspólne jest dodatnie, tranzystory nie wpływają na pracę wzmacniacza. Klucze PMOS mają w stanie przewodzenia bardzo małą rezystancję, znacznie poniżej 1Ω. Ponieważ wejściowy prąd polaryzujący wzmacniacza ma również niewielkie natężenie (maksymalnie 12μA w przypadku MAX4080), dodatkowy spadek napięcia na tranzystorze PMOS jest pomijalnie mały i nie ma wpływu na istotne parametry wzmacniacza, takie jak np. wejściowe napięcie niezrównoważenia.
Czujniki prądu – aplikacje
Precyzyjny pomiar natężenia prądu jest wymagany w wielu aplikacjach, stąd czujniki tego typu są często nieodłącznym elementem różnych urządzeń. Przykładem są układy zabezpieczające przed przeciążeniem, pętle prądowe 4–20mA, programowalne źródła prądowe, zasilacze, ładowarki baterii, układy napędowe i wiele innych.
Wybrane sposoby wykorzystania czujników prądu high-side w różnych urządzeniach przedstawimy na podstawie rozwiązań z oferty firmy Maxim. Na rysunku 6 widoczny jest schemat układu zabezpieczającego przed zwarciem i przeciążeniem, zrealizowanego z wykorzystaniem czujnika prądu MAX4373. Czujnik ten oprócz wzmacniacza current-sense zawiera w swojej strukturze także komparator oraz referencyjne źródło napięciowe.
Komparator porównuje napięcie wyjściowe wzmacniacza mierzącego prąd obciążenia z wewnętrznym źródłem napięcia. Jeżeli natężenie prądu obciążenia przekracza ustaloną wartość, komparator polaryzuje przełącznik MOSFET, który odcina zasilanie. Stan taki utrzymuje się do momentu zmiany stanu linii Reset, sterującej pracą komparatora.
Rys. 9. Zasada pomiaru mocy w MAX4211
Prąd wyzwolenia zabezpieczenia można ustalać dobierając rezystory R1 i R2 (odpowiednie zależności można znaleźć w karcie katalogowej MAX4373). Na rysunku 7 przedstawiono z kolei tzw. sterownik hot-swap MAX5933. Zadaniem tego typu układów jest ograniczanie niekorzystnych zjawisk, takich jak zwarcia lub prądy rozruchowe o dużym natężeniu, które występują w momencie podłączania lub odłączania komponentów urządzenia przy włączonym zasilaniu.
W trakcie rozruchu MAX5933 pracuje jako stabilizator prądu, ograniczający prąd pobierany przez obciążenie. Dodatkowo, jeżeli wystąpi zwarcie, sterownik automatycznie zmniejsza graniczną wartość prądu w przybliżeniu 4-krotnie. Jeżeli natężenie prądu w czasie normalnej pracy urządzenia ustalono na maksymalnej wartości 1,88A, to w momencie awarii dopuszczalna wartość graniczna zostanie obniżona do około 480mA.
Dodatkowo, MAX5933 zapewnia też ochronę przed przepięciami i nadmiernym wzrostem temperatury. Kolejnym przykładem jest wskaźnik naładowania akumulatora, wykorzystujący układ MAX1660 (rys. 8). Zawiera on dodatkowy komponent, tzw. licznik ładunku (coulomb counter), który pełni rolę układu całkującego sygnał wyjściowy wzmacniacza current- sense mierzącego prąd baterii.
W momencie, gdy licznik przekroczy pewną wartość zadaną, do mikrokontrolera przesyłana jest informacja o pełnym naładowaniu akumulatora. W chwili, gdy przekroczony zostanie dolny limit, do mikrokontrolera trafia informacja o rozładowaniu baterii. W ten sposób MAX1660 chroni akumulator przed nadmiernym rozładowaniem i naładowaniem. Oprócz tego zabezpiecza akumulator przed zwarciem i przeciążeniem.
Czujniki prądu z układami mnożącymi

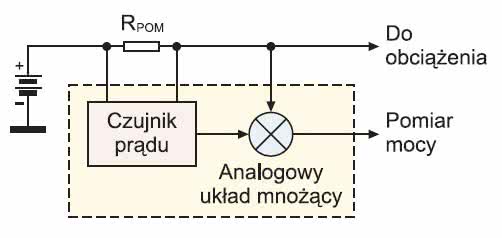
Rys. 10. Wewnętrzny analogowy układ mnożący zwiększa dokładność
pomiarów prądu
Czujniki prądu znajdują też zastosowanie przy pomiarach mocy. Wzmacniacz MAX4211 zawiera w swojej strukturze analogowy układ mnożący (rysunek 9), którego napięcie wyjściowe jest proporcjonalne do mocy dostarczanej do obciążenia. Inny sposób wykorzystania układu mnożącego przedstawiono na rysunku 10.
W tym wypadku oprócz napięcia wyjściowego czujnika prądu przetwarza on także sygnał z referencyjnego źródła napięcia przetwornika C/A, do którego doprowadzone jest napięcie wyjściowe układu mnożącego. Taka konfiguracja zwiększa dokładność pomiaru prądu, uniezależniając wynik od dokładności i stabilności źródła napięcia referencyjnego, zmieniających się pod wpływem różnych czynników, np. temperatury.
W układzie z rysunku 10 wykorzystano komponenty o następujących wartościach: VREF = 3,8V, R1 = 2,8kΩ, R2 = 1kΩ. Stąd VIN= 1V. W związku z tym, że wzmocnienie układu MAX4211 wynosi 25, a napięcie pomiarowe (VPOM) zmienia się od 0 do 150mV, napięcia PWY i IWY będą się mieścić w zakresie od 0 do 3,75V (proporcjonalnie do prądu płynącego przez obciążenie).
W takim wypadku jako sygnał wyjściowy lepiej jest jednak wykorzystać napięcie PWY niż IWY, co wynika bezpośrednio z poniższych równań opisujących stosunek między sygnałem wejściowym przetwornika C/A i napięciem odniesienia w obu przypadkach:
Pwy/Vref=(IPOM∙RPOM∙25∙VREF∙R1/(R1+R2))/VREF=IPOM∙RPOM∙25∙R2/(R1+R2)
oraz IWY/VREF=(IPOM∙RPOM∙25)/VREF
Jak widać, gdy w przetworniku A/C przetwarzany jest sygnał PWY, wynik pomiaru w postaci cyfrowej nie zależy od dokładności źródła VREF. W drugim wypadku natomiast trzeba się liczyć z błędami, w zależności od dokładności źródła napięcia referencyjnego.
Monika Jaworowska











