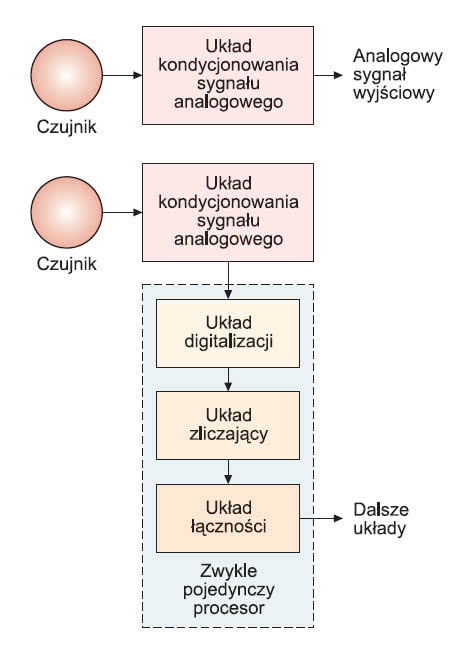
Rys. 1. Schemat blokowy typowego czujnika inteligentnego
Użyteczność czujnika zależy od pięciu podstawowych czynników. Pierwszym z nich jest konieczność jego wykalibrowania w sposób, umożliwiający sygnałowi wyjściowemu poprawne odzwierciedlanie mierzonego parametru. Sygnały niekalibrowanych czujników są niedokładne, a korzystające z nich systemy nie mogą działać poprawnie. Ale nie w każdym przypadku precyzyjna kalibracja jest niezbędna.
Na przykład błąd termostatu systemu ogrzewania mieszkania nie obniża jakości tego systemu. I tak przecież temperaturę w domu reguluje się według oceny subiektywnej. Natomiast w przemysłowym reaktorze chemicznym różnica jednego czy dwóch stopni może wyznaczać różnicę pomiędzy dobrym produktem a bezużytecznym odpadem, a czasem nawet eksplozją.
Dokładna kalibracja czujnika jest więc zalecana, a często wręcz konieczna. A kalibracja już zainstalowanego czujnika jest często bardzo trudna, czy wręcz niemożliwa do przeprowadzenia. Drugim czynnikiem jest uzależnienie własności czujnika od upływu czasu. Na przykład pomiar natężenia prądu w określonym obwodzie układu elektrycznego przez monitorowanie spadku napięcia na rezystorze.
Czujnikiem jest wtedy rezystor, a mierzone napięcie jest zgodnie z prawem Ohma proporcjonalne do natężenia prądu. Ale w miarę starzenia się rezystora jego rezystancja może ulegać zmianom. Jeśli przykładowo pomiar prądu 100mA wykaże napięcie 2,70V, po pięciu latach przy tym samym natężeniu prądu napięcie może wynieść 2,76V.
Chociaż różnica 0,06V nie wydaje się wielka, to w zależności od aplikacji może znaczyć dużo. Powolne zmiany właściwości podzespołów są nazywane dryfem. Do wymagań stabilnej kalibracji w niektórych urządzeniach dochodzą ostre wymagania ograniczania dryfu. Skutki niekompensowanego dryfu mogą być bardzo szkodliwe. Przy pomiarze napięcia, służącym do monitorowania natężenia prądu, pierwotnym czujnikiem jest rezystor, a woltomierz wtórnym.
Ale sam woltomierz również jest uzależniony od kalibracji i od dryfu. Bardzo ważne jest zatem rozróżnienie pomiędzy czujnikiem pierwotnym a wtórnym i świadomość celu pomiaru. Na skutek niefrasobliwości w tym zakresie mógłby powstać system, który w rzeczywistości nie mierzy pożądanego parametru albo niepotrzebnie obniża dokładność pomiaru.
Wpływ otoczenia
Trzecim czynnikiem wpływającym na działanie czujników jest zmienność środowiska, w którym pomiar się odbywa. Doskonałą ilustracją takiego wpływu jest silnik spalinowy z elektronicznym zapłonem. W momencie pierwszego uruchomienia silnika cały osprzęt jest w idealnym stanie, ale także zaczyna ulegać zużyciu.
Jeśli system elektronicznego sterowania silnikiem nie otrzymuje informacji o tych zmianach i nie może ich uwzględniać w działaniu, warunki pracy silnika zaczynają coraz bardziej odbiegać od optymalnych. Zdolność kompensacji ekstremalnych czasem zmian otoczenia w niektórych zastosowaniach czujników może mieć w praktyce wielkie znaczenie.
Kondycjonowanie
Czwartym czynnikiem jest dla większości czujników potrzeba uzupełnienia o układ kondycjonowania sygnału, który ułatwia praktyczne jego użycie do monitoringu lub sterowania. Układ ten przetwarza sygnał sensora (najczęściej analogowe napięcie, uzależnione w specyficzny sposób od mierzonego parametru) na sygnał dający się łatwo użyć w systemie.
W zależności od aplikacji układ kondycjonowania może być tak prosty, jak wzmacniacz zwiększający sygnał do użytecznego poziomu, albo może być złożonym urządzeniem, chroniącym sygnał przed zakłóceniami, czy kompensującym wpływy otoczenia. Często układ kondycjonowania musi być do sensora dostrajany, co w przypadku sygnałów analogowych sprowadza się na przykład do regulacji za pomocą potencjometru.
Układy te muszą być nieraz dostosowane również i do aplikacji, stając się w rezultacie rozwiązaniami specyficznymi. Istotnym składnikiem układu kondycjonowania sygnału jest interfejs, poprzez który komunikuje się z systemem i ewentualnie z użytkownikiem. Istnieje wiele rodzajów interfejsów, zarówno elektronicznych, z których można wymienić na przykład choćby RS232/422/485, I2C, czy USB, jak i wizualnych w postaci rozmaitych wyświetlaczy alfanumerycznych.
Telemetria
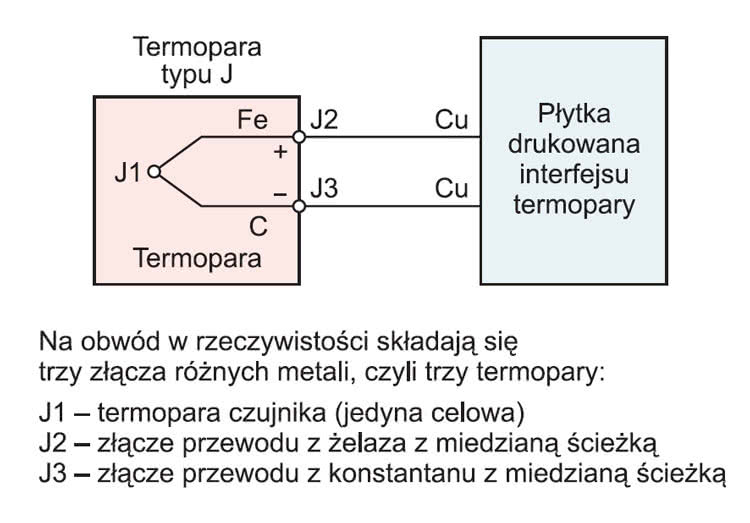
Rys. 2. Obróbka sygnału z termopary wymaga uwzględniania wielu problemów związanych z naturą pomiaru i dużą podatnością na zaburzenia sygnału wyjściowego
Piątym czynnikiem warunkującym dobre działanie czujników jest łączność. Standardowe komponenty wymagają zwykle umieszczenia w miejscu pomiaru, ale im ich odległość od otrzymującego sygnały systemu monitoringu i sterowania jest większa, tym użyteczność pomiarów jest gorsza, głównie z powodu zakłóceń, na które długie doprowadzenia są podatne.
Stosowanie długich specjalnych kabli jest kosztowne. Dlatego ważnym składnikiem systemów czujnikowych jest układ telemetryczny, służący do przesyłania sygnału czujnika do dalszego wykorzystania.
Digitalizacja
Bardzo istotnym zabiegiem, podnoszącym jakość sygnału czujnika, jest jego digitalizacja. Przy projektowaniu systemów wykorzystujących czujniki najpierw trzeba przedstawić w matematycznej formie reakcję czujnika i układu kondycjonującego na zmiany mierzonego parametru, a następnie reakcję tę przetworzyć w formę cyfrową.
Na koniec musi zostać zaprojektowany realizujący tę funkcję odpowiedni układ elektroniczny. Trzeba jednak pamiętać, że opracowany matematyczny model sygnału jest jedynie przybliżeniem, choć nieraz dosyć dokładnym. Utrzymywanie możliwie największej części systemu w obszarze matematycznym jest bardzo korzystne, liczby bowiem nie dryfują z czasem i dają się manipulować dokładnie i łatwo.
A zasady cyfrowego przetwarzania sygnałów w DSP, za pomocą którego sygnały są manipulowane bardziej matematycznie niż elektronicznie, są dobrze rozwinięte i szeroko praktykowane. Takie standardowe przetwarzanie, jak filtracja, służąca do usuwania niepożądanych zaburzeń czy do rozróżniania częstotliwości, umożliwiająca identyfikację poszczególnych składowych sygnału, są dokonywane bez trudu za pomocą DSP.
W ten sposób można też wykonywać działania niemożliwe do realizacji nawet w bardzo złożonych układach elektronicznych. Dlatego układy kondycjonujące często obecnie zawierają stopień przetwarzania analogowych wartości sygnału w cyfrowe. Użycie konwertera analogowo-cyfrowego okazuje się niezwykle korzystne, ponieważ sygnał przetworzony w postać cyfrową może być dowolnie obrabiany przez odpowiednio zaprogramowany mikroprocesor.
Przetworniki A/C to zwykle samodzielne układy półprzewodnikowe, działające bardzo stabilnie i bardzo dokładnie nawet w zmiennych warunkach otoczenia. Układy kondycjonujące mogą zostać znacznie uproszczone dzięki możliwości zintegrowania obwodów kompensujących wpływy otoczenia z przetwornika A/C i powierzenia oprogramowaniu funkcji filtracyjnych. Rezultatem redukcji układu od strony sprzętowej oraz wzrostu udziału oprogramowania w matematycznej obróbce sygnału jest ogromny zysk zarówno z punktu widzenia jakości działania, jak i opłacalności.
Zaopatrzenie czujnika w inteligencję
Naturalną konsekwencją przetwarzania sygnału czujnika w postać cyfrową jest rozszerzenie jego wykorzystywania za pomocą specjalnego oprogramowania i dostosowanego do aplikacji algorytmu. Taki sposób wyposażenia czujnika w inteligencję realizowany jest za pomocą mikrokontrolera lub DSP. Inteligencja czujnika ułatwia pokonywanie przytoczonych poprzednio trudności.
Kalibracja może zostać zautomatyzowana, dryf właściwości elementów może zostać praktycznie wyeliminowany za pomocą czysto matematycznych algorytmów przetwarzania, a do periodycznego kompensowania zmian otoczenia można wykorzystywać ich monitorowanie. Wprowadzanie inteligencji upraszcza projektowanie całego systemu.
Trzy nieodzowne składniki czujnika inteligentnego to poza sensorem odpowiednio oprogramowany element rejestrujący, analizujący, przetwarzający i kondycjonujący wyniki pomiarów czujnika. To także interfejs łączności z systemem, pozwalający na wymianę informacji z innymi elementami systemu (rys. 1). Funkcjonalność takiego elementu w dużej mierze zależy od sterującego nimi oprogramowania, które decyduje o działaniu całego systemu.
Czujniki inteligentne i ich przeznaczenie mogą zatem być różnicowane drogą zmian konfiguracji oprogramowania. Dla dostawców wynikają z tego dwie istotne konsekwencje. Po pierwsze, ich produkty przestają być prostym sprzętem, stają się urządzeniami o dużym udziale oprogramowania. Chociaż główną platformą czujnika jest sprzęt, jest to bowiem urządzenie fizyczne, to podstawowym wehikułem wartości dodanej jest kontrolujące czujnik oprogramowanie.
Wytwórca urządzenia, uruchamiając lub blokując jego funkcje bitami konfiguracyjnymi w oprogramowaniu, może niemal natychmiastowo modyfikować produkt, dowolnie zmieniając jego konfigurację aż do fazy końcowych testów i wysyłki. Jedna platforma sprzętowa może być wykorzystywana w wielu różnych produktach, przeznaczonych na różne segmenty rynku, przy różnych poziomach cenowych.
Dzięki niewielkim kosztom opracowywania nowych zastosowań i właściwości urządzeń poszerzenie ich funkcjonalności może stać się źródłem dodatkowych zysków. Drugą konsekwencją jest możliwość aktualizacji oprogramowania czujników nawet już działających u odbiorcy. Dostawca bowiem ma możliwość gromadzenia informacji o działaniu czujników w realnych warunkach i stałego modyfikowania swoich produktów.
Informacje te dają producentowi cenny wgląd w potrzeby i kłopoty użytkowników oraz brane z rzeczywistości dane, pozwalając doskonalić działanie czujników w najważniejszym dla odbiorcy, a zatem najbardziej przez niego cenionym, zakresie. Dzięki tym informacjom producenci czujników mogą szybko dodawać nowe właściwości, oferować nowe konfiguracje czy proponować serwis, nie musząc dotykać samego czujnika. Serwis może być obecnie tanio świadczony z centrali, zapewniając producentowi mniejsze koszty.
Bariery do rozwoju
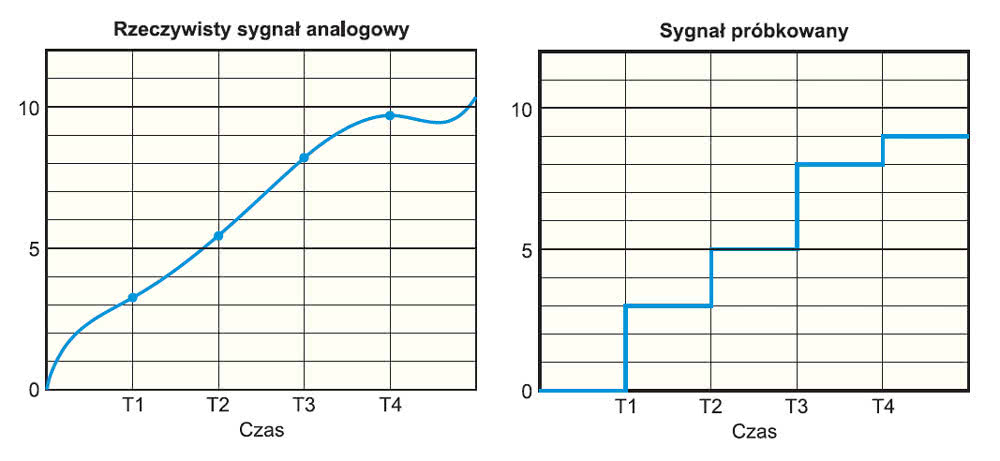
Rys. 3. Proces digitalizacji sygnału o czterech kolejnych próbkach
Inteligentne czujniki nie mogą być instalowane, gdy infrastruktura u odbiorcy nie spełnia wymogów ich zasilania i komunikacji. Chociaż coraz więcej zakładów przemysłowych jest wyposażanych w sieci, to instalacja inteligentnych czujników zawsze pociąga za sobą pewne koszty, które muszą podlegać ocenie opłacalności. Niektóre nowsze protokoły sieciowe przewidują dostarczanie zasilania wraz z przesyłaniem sygnałów (np. Power-over-Ethernet), ale okablowanie starszych instalacji przemysłowych bywa kosztowne.
Na rynki wchodzą nowsze energooszczędne czujniki bezprzewodowe, które ułatwiają pokonywanie tych trudności. Są one droższe w instalacji, ale na dłuższą metę ich koszt jest mniejszy. Barierą stosowania czujników inteligentnych są także warunki środowiskowe danej aplikacji, wykluczające użycie dodatkowych układów elektronicznych.
Takie warunki mogą być narzucane rozmiarami, temperaturą, silnymi drganiami, czy przez żrące chemikalia. Jedynym wtedy rozwiązaniem może być uodporniony czujnik standardowy. Jakość jego działania może być często znacznie usprawniona przetwarzaniem sygnału w cyfrowy w miejscu możliwie bliskim lokalizacji czujnika.
Przykłady czujników inteligentnych
Temperatura jest jednym z najczęściej wykorzystywanych w przemyśle parametrów procesowych, a powszechnie używanym i niezwykle prostym czujnikiem temperatury jest termopara. Jej napięcie wyjściowe jest bardzo małe, rzędu miliwoltów, a często jest mierzone wśród znacznych zakłóceń, mogących osiągać setki woltów. Powstający sygnał jest dodatkowo komplikowany nieliniowością zależności napięcia od temperatury.
Nieliniowość tę zwykle kompensuje się przed dokonaniem odczytu. Wyprowadzenia termopar, łączące je z kontrolerami, mają zwykle znaczną długość (rys. 2). Dlatego digitalizacja danych temperaturowych w możliwie bezpośredniej bliskości termopar i przekazywanie ich standardowymi magistralami jest rozwiązaniem bardzo korzystnym.
W przypadku licznych punktów pomiarowych temperatury, która zwykle zmienia się powoli, sygnały mogą być przesyłane do kontrolera w postaci zmultipleksowanej w czasie. Na przykład dane 96 kanałów termoparowych można łatwo dostarczać do kontrolera stosunkowo odporną na zakłócenia skrętką miedzianych przewodów.
Filtracja oraz próbkowanie
W formowaniu sygnału czujnika inteligentnego bierze udział przede wszystkim filtracja i próbkowanie, będące podstawą jego digitalizacji (rys. 3). Filtracja służy do eliminacji tych wszystkich składowych sygnału, które nie niosą pożądanych informacji, a próbkowanie przetwarza informacje analogowe w formę cyfrową. Najczęściej wykorzystywany jest filtr dolnoprzepustowy.
Pasmo jego przepuszczania wynosi typowo 1500Hz. Filtry dolnoprzepustowe są chyba najczęściej stosowanymi filtrami, gdyż najprostszym sposobem ograniczenia szumów jest stłumienie wszystkich częstotliwości wyższych od granicznej. W przypadku pomiarów temperatury częstotliwość ta jest stosunkowo niska, ogranicza ją bowiem bezwładność termiczna mierzonego ośrodka.
Wszelkie składowe wyższej częstotliwości nie zawierają żadnych informacji temperaturowych. Filtry górnoprzepustowe mają zastosowanie do czujników ze zmiennoprądowym sygnałem, z którego można i należy odfiltrować wszystkie składowe poniżej częstotliwości podstawowej. Na przykład w sygnałach akustycznych przeznaczonych dla ludzkiego ucha wszystkie częstotliwości niższe od 20Hz, dolnej granicy słyszalności, można traktować jako bezużyteczne.
Filtry środkowoprzepustowe do eliminacji wszystkich składowych sygnału poza mieszczącymi się w wybranym paśmie, gdy sygnał użyteczny ma ograniczony zakres częstotliwości, na przykład w czujnikach wibracji, spalania stukowego w silnikach i podobnych. Z kolei filtr środkowozaporowy najczęściej służy do tłumienia zaburzeń wywoływanych częstotliwością sieciową 50Hz lub 60Hz.
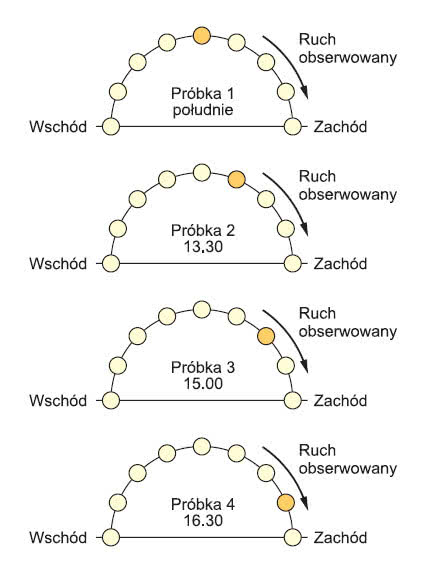
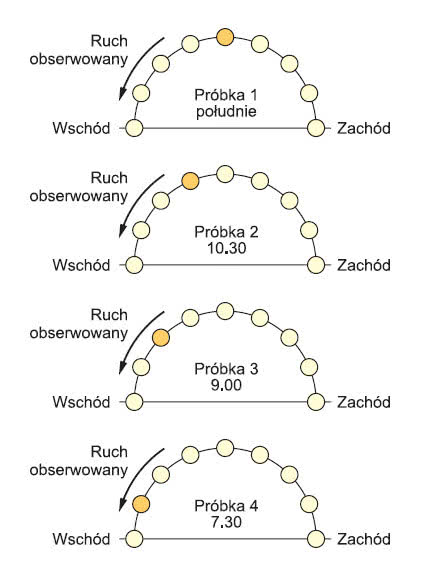
AliasingGdy najwyższa składowa częstotliwość sygnału przekracza dwukrotność częstotliwości próbkowania, zwaną częstotliwością Nyquista, składowe powielanych widm nakładają się. Efekt ten, gdy niektóre wyższe składowe jednego widma nie dają się odróżnić od niektórych niższych składowych następnego, wyżej powielonego widma, jest nazywany aliasingiem. Aliasing powinien zostać z systemu wyeliminowany, a zredukowanie jego skutków do pomijalnego poziomu jest możliwe przez wybór dostatecznie dużej szybkości próbkowania. Prostym, ale bardzo widowiskowym przykładem błędów spowodowanych przez aliasing może być próbkowanie pozycji słońca w różnych porach dnia, co jest podstawą czujników zmierzchowych niezawierających zegara RTC i załączających oświetlenie przed wschodem słońca. Na rysunkach przedstawiono pierwszy zbiór pomiarów, dokonywanych co 1,5 godziny. Zgodnie z przewidywaniami pomiary wykazują, że słońce porusza się ze wschodu na zachód. Drugi zbiór pomiarów, dokonywanych co 22,5 godziny, w skutek aliasingu odczytuje się z niego, że słońce porusza się z zachodu na wschód.
|
Filtry cyfrowe
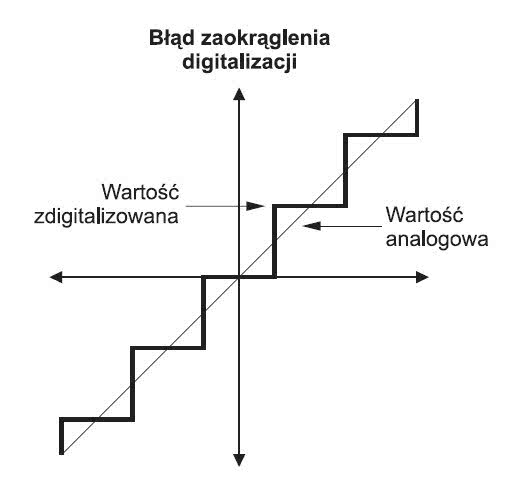
Rys. 4. Błąd digitalizacji sygnału spowodowany zaokrąglaniem
Filtry cyfrowe to algorytmy przetwarzające utworzone przez próbkowanie sygnały cyfrowe. Powstają one przez przypisywanie współczynników wagowych jednemu lub kilku wartościom próbkowanych danych i sumowanie ważonych wartości. Na przykład dla próbkowanego sygnału wejściowego
xi dla i = 0, 1, 2, ... N-1
można wygenerować przefiltrowany sygnał wyjściowy yi:
yi = a0x0 + a1x1 + ... + aN-1xN-1
gdzie ai są stałymi współczynnikami ważenia, przyporządkowanymi próbkom sygnału wejściowego xi. Przykładem cyfrowego filtra dolnoprzepustowego jest filtr uśredniający, którego sygnał wyjściowy jest po prostu średnią danej liczby próbek. Sygnał zostaje w ten sposób wygładzony, ponieważ szum jest uśredniany w całej grupie próbek. Jeżeli dla uzyskania przefiltrowanego sygnału wyjściowego do uśrednienia wybiera się cztery próbki, otrzymuje się:
yi = ¼ x0 + ¼ x1 + ¼ x2 + ¼ x3
Sygnał wyjściowy filtra może być kształtowany doborem współczynników wagowych dla poszczególnych próbek. Dla ułatwienia projektantom pracy wiele firm oferuje programy do projektowania i analizy filtrów cyfrowych. Darmowe wersje takich programów są dostępne w Internecie. Poprzedni przykład pokazuje strukturę filtra o skończonej odpowiedzi impulsowej (SOI, czyli FIR). Filtry takie zawsze mają skończoną liczbę próbek, zatem ich sygnał wyjściowy zależy jedynie od skończonej liczby próbek wejściowych. Jeśli sygnał wejściowy wprowadza się do filtra o długości N elementów, to sygnał wyjściowy zakończy się po N-tej próbce, ponieważ kolejne próbki wejściowe są już zerowe. Inną strukturę stanowi filtr o nieskończonej odpowiedzi impulsowej (NOI czyli IIR). W tych filtrach ważone są zarówno próbki sygnału wejściowego, jak i sygnału wyjściowego, który przyjmuje postać:
yi = b0yI-1 + b1yI-2 + ... bi-Kyi-K-1 + a0x0 + ... aN-1xN-1
gdzie współczynniki bi są stałymi współczynnikami ważenia odpowiednich wyrazów yi-1. Na pierwszy rzut oka ten filtr może się wydać znacznie bardziej skomplikowany, ale tak nie jest. Taką samą funkcję jak poprzednio przytoczonego czteropróbkowego filtra uśredniającego można zrealizować następująco:
yi = yi-1 + ¼ x0 - ¼ x4
Redukcja wymagań obliczeniowych o jedną próbkę nie jest istotna, znaczne zmniejszenie wymagań obliczeniowych i pamięciowych daje się uzyskać w systemach IIR, jednakże pewnym kosztem. Filtry IIR teoretycznie reagują na sygnały nieskończone (stąd ich nazwa), co nie jest pożądane. Trzeba zadbać, aby błędy się nie kumulowały, gdyż wtedy filtry mogą okazać się bezużyteczne.
Filtry uśredniające (median filters)
Omówione dotąd filtry opisuje się prostymi równaniami matematycznymi, ich działanie daje się więc łatwo analizować znanymi i zrozumiałymi sposobami. Filtry te, odpowiednio projektowane, najlepiej dają się używać do redukcji szumów o specyficznych widmach.
Czasami jednak systemy są podatne na szum zwany śrutowym, w których mierzonemu sygnałowi towarzyszą szumy o charakterze nie ciągłym, lecz wybuchowym. Do przeciwdziałania temu zjawisku stosuje się inny sposób filtracji, zwany filtrowaniem uśredniającym, w pewnym sensie bardziej heurystyczny, ale doskonale redukujący szumy śrutowe.
W filtrze uśredniającym sygnał jest próbkowany tak samo jak w innych filtrach, ale próbki są szeregowane od największych do najmniejszych (lub odwrotnie, nie wpływa to na wynik) i wybierana jest próbka średnia.
Błędy próbkowania, reprezentacji liczb
Zamiana sygnału analogowego na wielkość cyfrową zawsze wiąże się z pojawieniem się błędów próbkowania, wynikających z reprezentowana sygnału przez skończoną liczbę bitów. Nawet przy znacznej rozdzielczości przetwornika A/C niemal wszystkie wartości napięcia sygnału (za wyjątkiem punktów próbkowania) są obarczone błędem.
Błędy te można uważać za sygnał szumów, nałożony na rzeczywistą wartość sygnału, co ilustrują rysunek 4 i rysunek 5. Zależnie od sposobu digitalizacji, przez zaokrąglanie wartości mierzonej (rys. 4) czy przez obcinanie (rys. 5), szum będzie trójkątny lub piłozębny. Efektu tego wyeliminować się nie da, ale można go wydatnie ograniczyć przez użycie stosunkowo dużej liczby bitów (np. 16 lub 32, zależnie od zastosowania).
Skutkiem digitalizacji są także niedokładności wynikające ze skończonych liczb reprezentujących ciągłą wielkość analogową i skończonego rozmiaru rejestru, w którym musi się ona zmieścić. Z rozmiarem rejestru jest powiązane wykonywanie powtarzalnych działań matematycznych na liczbach reprezentowanych skończoną liczbą bitów, co może powodować przepełnienie akumulatora w procesorze.
Można to pokazać na prostym przykładzie. Jeśli założyć, że aplikacja przetwarza cyfrowy 16-bitowy sygnał wejściowy i że procesor ma 16-bitowy akumulator, to próba uśrednienia dwóch próbek o wielkości ¾ zakresu digitalizacji w akumulatorze 16-bitowym, da wynik nie 17FFEh, tylko 7FFEh, ponieważ bit najbardziej znaczący zostanie obcięty.
Można co prawda użyć większego akumulatora (o większej liczbie bitów), ale problem pozostaje nieodłączny od systemu i pogarsza się, gdy używa się operacji mnożenia. Zastosowanie odpowiednich sposobów wewnętrznego przedstawiania wartości numerycznych i uważne posługiwanie się przypadkami nadmiaru i niedomiaru może łagodzić skutki ograniczonej wielkości rejestrów, ale zawsze niezbędna jest dbałość o unikanie katastrofalnych awarii systemu.
Nadpróbkowanie i opóźnienia
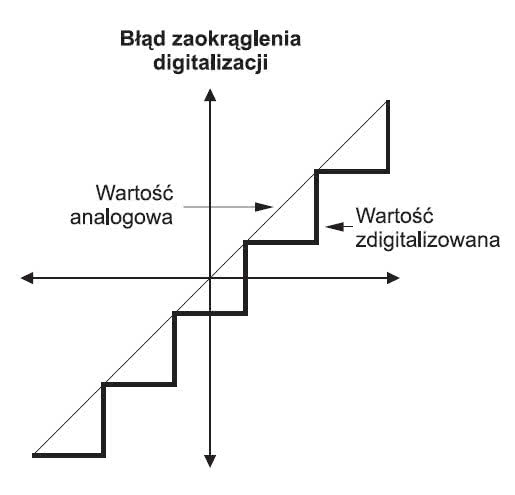
Rys. 5. Błąd digitalizacji sygnału spowodowany obcinaniem
Chcąc uniknąć aliasingu, projektant musi zapewnić, aby próbkowanie sygnału wejściowego było minimum dwukrotnie szybsze od najwyższej częstotliwości sygnału wejściowego. Niemniej rzeczywiste przetworniki A/C na tyle różnią się od idealnych, że sygnały wejściowe powinny być próbkowane co najmniej cztery do pięciu razy szybciej (nadpróbkowanie) od najwyższej częstotliwości zawartej w sygnale wejściowym.
Rozsuwa to próbkowane widma, minimalizując interakcje pomiędzy nimi. Innym problemem jest opóźnienie pomiędzy sygnałem wyjściowym a wejściowym filtra, powstające zarówno w filtrach cyfrowych, jak i analogowych. Zwykle im sygnał jest silniej filtrowany, tym opóźnienie to jest większe.
W skrajnych przypadkach (zależnie od aplikacji) przefiltrowany sygnał wyjściowy może okazać się bezużyteczny, gdyż pojawia się w systemie zbyt późno. Nadpróbkowanie, czyli próbkowanie sygnału znacznie szybsze niż jest to niezbędne, może być stosowane wraz z silną filtracją bez zbyt wielkich opóźnień w systemie.
Tak przetworzone sygnały mogą być wykorzystywane w innych częściach systemu, ale z uwzględnieniem opóźnienia. Takie podejście wymaga jednak większej mocy obliczeniowej do obsługi wyższej przepływności, co podwyższa koszt układu i zużycie energii.
Analiza zastosowań sygnałów czujników
Przy analizowaniu specjalnych układów przetwarzania sygnałów czujników niezbędne jest rozumienie aspektów systemu jak m.in. rodzaju mierzonej wielkości fizycznej, zależności rejestrowanego parametru od mierzonej wielkości fizycznej, oczekiwanego widma częstotliwości sygnału oraz wszystkich źródeł zakłócających środowisko, fizycznych własności środowiska pomiarowego, uwarunkowań mogących powstawać błędów i właściwych sposobów im przeciwdziałania, wymagań kalibracyjnych i konserwacyjnych.
Zwykle rodzaj i ośrodek mierzonej wielkości fizycznej wyznaczają odpowiedni dla systemu czujnika sposób przetwarzania sygnału. Gdy na przykład mierzy się temperaturę znacznej masy metalu, podgrzewanej niewielkim grzejnikiem, można przyjąć, że widmo częstotliwości sygnału czujnika jest wąskie, ponieważ temperatura zmienia się powoli. Sygnał ten w celu ograniczenia szumów może być wtedy silnie filtrowany.
Natomiast temperatura czujnika monitorującego niewielki element ogrzewany laserem będzie się prawdopodobnie zmieniała bardzo szybko. Filtracja musi być wtedy delikatna, a do ograniczania zaburzeń w sygnale potrzebne są stosowne dodatkowe środki. Bardzo ważne jest również rozumienie zależności pomiędzy mierzoną wielkością fizyczną a związanym z nią parametrem, przekazywanym użytkownikowi i do systemu.
Czy parametr ten jest liniową funkcją mierzonej wielkości, czy nieliniową, jak w przypadku temperatury i napięcia termopary? Czy w razie nieliniowości tej zależności da się ją podzielić na kilka liniowych segmentów, dla uproszczenia obliczeń? Trzeba wreszcie pamiętać, że systemy czujnikowe działają w realnym świecie, w którym trudności zdarzają się w najbardziej niekorzystnych okolicznościach.
System musi szybko i skutecznie wykrywać najczęstsze błędy. Utrata czujnika w trakcie produkcji może zatrzymać całą linię produkcyjną, więc szybkie wykrywanie i usuwanie błędów ma wysoką rangę. Ważniejsza od ułatwionego serwisu jest zabezpieczająca przed awariami zdolność systemu do wykrywania zagrożeń przez sygnalizowanie i usuwania błędów.
Struktura oprogramowania musi być rzetelnie przystosowana do działania w czasie rzeczywistym, gdyż reakcja czujnika na sygnał wejściowy musi być deterministyczna, w ustalonym czasie, a przetwarzanie sygnału, przynajmniej w krytycznych sekcjach, kończone przed nadejściem kolejnego sygnału. Mniej krytyczne, choć ważne sekcje, jak na przykład program obsługi protokołu komunikacyjnego, mogą być mniej rygorystycznie uzależnione czasowo i ustępować w czasie sygnałom ważnym dla aplikacji.
Wykrywanie i analiza błędów
Zdolność wykrywania błędów w działaniu sensora, czujnika i wychodzenia z powstających zagrożeń staje się cechą wyróżniającą produkt spośród konkurencyjnych, zwłaszcza gdy skutki błędów mogą być katastrofalne. Prosta detekcja błędów sprowadza się do sprawdzania obecności czujnika i utrzymywania się wartości mierzonego parametru we właściwym zakresie.
Bardziej złożona detekcja polega na diagnozowaniu parametrów sygnału i ostrzeganiu systemu i nadzoru przed grożącą awarią. W przypadku nowoczesnych czujników zagadnieniu temu poświęca się wiele uwagi, a wielkość kodu oprogramowania diagnostycznego stanowi znaczącą część firmware'u. (KKP)













