Główne zalety, które wpływają na rozwój technologii w matrycach CMOS, to mały pobór mocy w porównaniu z czujnikami CCD oraz możliwość konstruowania systemów System On Chip, czyli integracji wszystkich elementów kamery w jednym układzie. Duży stopień integracji i małe wymiary gotowych układów umożliwiły dynamiczny rozwój aparatów wbudowanych w telefony komórkowe. Zdobycie tak dużego rynku zapewniło środki finansowe przeznaczane na dalszy rozwój technologii.
Podział czujników CMOS
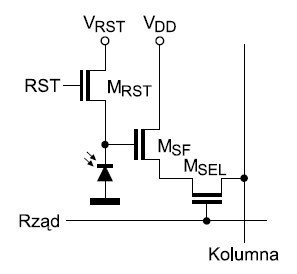
Gotowe produkty dostępne na rynku można podzielić ze względu na stopień integracji na cztery grupy. Czujniki PPS (Passive Pixel Sensor) były stosowane w pierwszych rozwiązaniach (rys. 2). Zawierają tylko element światłoczuły i dwa tranzystory sterujące. Dzięki małej liczbie tranzystorów duża część powierzchni krzemu jest przeznaczona na zbieranie ładunków, jednak z powodu dużego poziomu szumów rozwiązanie to nie jest już stosowane.
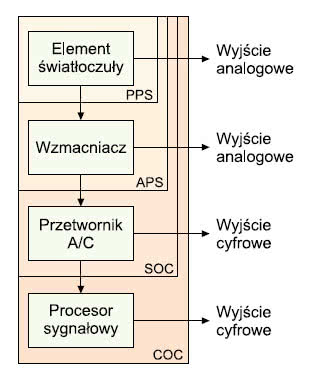
Rys. 1. Różne rozwiązania układów z czujnikiem CMOS |

Rys. 2. Schemat ideowy komórki PPS |
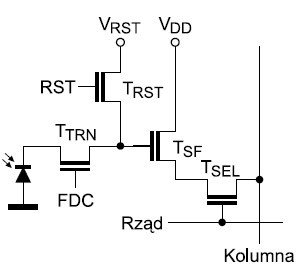
Rys. 3. Schemat ideowy komórki APS |
W układach APS (Active Pixel Sensor) dodano wzmacniacz, dzięki któremu wpływ szumu został zmniejszony. Układy typu SoC (System on Chip) zawierają wbudowany przetwornik analogowo-cyfrowy, a układy typu CoC (Camera on Chip) - często stosowane w telefonach komórkowych - są już wyposażone we własny procesor sygnałowy realizujący podstawowe algorytmy przetwarzania obrazów. Matryca światłoczuła PPS składała się (tak jak w CCD) z elementów światłoczułych i elementów sterujących.
Zebrane ładunki były przesyłane z całej kolumny, a następnie wzmacniane poza matrycą. Rozwiązanie to ma wiele zalet. Większa część powierzchni światłoczułej jest przeznaczona na zbieranie ładunków, nie ma problemu z dopasowaniem parametrów kilku wzmacniaczy, a konstrukcja samej matrycy jest mniej skomplikowana. Jednak poziom szumów, które dodatkowo były wzmacniane razem z sygnałem użytecznym na długi czas blokował rozwój tego typu czujników. Wadą jest też długi czas odczytu matrycy. Obecnie nie rozwija się już technologii czujników pasywnych.
Na rysunku 3 pokazana została pojedyncza komórka APS. Składa się z elementu światłoczułego i wzmacniacza. Od lat 90., kiedy to zaczęto produkować układy CMOS w technologii mniejszej niż 0,5μm, liczba dodatkowych tranzystorów w obszarze światłoczułym przestała być problemem. Główne problemy występujące w matrycach CMOS z komórkami aktywnymi to duże natężenie prądu ciemnego oraz duże szumy podczas odczytu. Minimalizację tych dwóch czynników uzyskano, wprowadzając nowe rozwiązania technologiczne na poziomie pojedynczego piksela.
Podstawowe rozwiązania komórek APS
Na rysunku 3 przedstawiono schemat układu zawierającego trzy tranzystory (3T). Rolę detektora pełni tu fotodioda P-N lub PiN. Tranzystor TRST służy do resetowania elementu, a tranzystor TSF pełni rolę wstępnego wzmacniacza i bufora. Pozwala na odczyt wartości zarejestrowanego napięcia bez konieczności rozładowywania fotodiody. Trzeci tranzystor TSEL zapewnia sterowanie całą matrycą i umożliwia odczytanie wartości danego piksela. Matryca jest zasilana ze źródła VDD. Proces odczytu jasności danego piksela przebiega następująco:
- tranzystor TRST otwiera się, aby zresetować element światłoczuły napięciem VDD,
- światło padające na element światłoczuły obniża napięcie na diodzie,
- otwierany jest tranzystor TSEL i napięcie (buforowane i wzmocnione przez tranzystor TSF) jest odczytywane z linii kolumn.
Po odczytaniu napięcia proporcjonalnego do natężenia oświetlenia dokonuje się dodatkowego pomiaru napięcia VRST. Wartość przekazywana do przetwornika A/C jest różnicą pomiędzy napięciem zmierzonym w drugim kroku, a napięciem diody oświetlonej. Wydawać by się mogło, że dodatkowy pomiar napięcia VRST wyeliminuje szumy wynikające z różnic parametrów tranzystorów i fluktuacji napięcia zasilającego. W dużej mierze udało się zmniejszyć wpływ szumów stałych, jednak nieprzewidywalne zmiany napięcia w krótkim czasie występującym między dwoma pomiarami nie mogą być wyeliminowane.
Rys. 4. Układ 4T - APS z czterema tranzystorami |
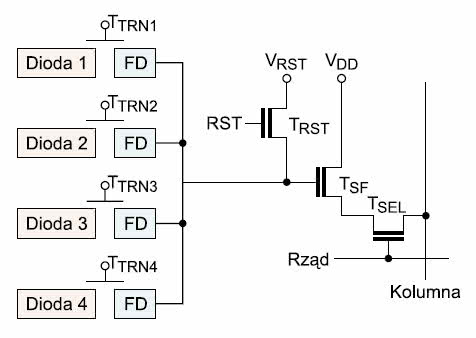
Rys. 5. Architektura współdzielonych pikseli |
Błąd ten jest często nazywany błędem kTC w nawiązaniu do równania, z którego można go oszacować. Dodatkowe szumy występujące w tym rozwiązaniu są związane z dużym prądem ciemnym diody, zmianą pojemności diody w funkcji napięcia zasilającego oraz wpływem ładunku resztkowego podczas rejestrowania obrazów szybko zmieniających się. W układzie czterech tranzystorów (4T) pomiędzy diodę i tranzystor resetujący wprowadzono dodatkowy obszar FD (Floating Diffusion), eliminujący wpływ zmian napięcia VRST na pomiar ładunku fotodiody.
W pierwszym etapie otwierany jest tranzystor TRST, a napięcie VRST ładuje obszar FD. Po zamknięciu tranzystora TRST napięcie zgromadzone w obszarze FD jest mierzone jako napięcie odniesienia. Następnie, po otwarciu TTRN ładunek zgromadzony w diodzie obniża napięcie obszaru FD. Stopień oświetlenia elementu światłoczułego jest mierzony, jako różnica napięć odniesienia i napięcia diody. Dzięki zastosowaniu dodatkowej warstwy udało się w dużym stopniu zmniejszyć poziom szumów.
Obniżyła się wartość prądu ciemnego oraz wyeliminowano wpływ zmian napięcia VRST na dokładność pomiaru. Niedogodnością stał się co prawda dodatkowy tranzystor zabierający miejsce dla samego elementu światłoczułego, ale w obliczu postępującej miniaturyzacji nie jest to wielkim problemem. Zastosowanie czwartego tranzystora pozwoliło także na współdzielenie układu odczytu przez kilka elementów światłoczułych. Przykład architektury z współdzielonymi pikselami przedstawiono na rysunku 5.
Bartłomiej Grześkowiak















