
W takich zastosowaniach cały czas zwiększa się zapotrzebowanie rynku na funkcje oparte na pozycjonowaniu, stąd często używa się odbiorników satelitarnych GNSS (Global Navigation Satellite System) obsługujących konstelacje satelitarne europejskiego systemu Galileo, amerykańskiego GPS, rosyjskiego Glonass i chińskiego systemu nawigacji satelitarnej BeiDou. Korzyści z używania wielokonstelacyjnych odbiorników GNSS obejmują lepszą dostępność sygnałów pozycyjnych, nawigacyjnych i czasowych (PNT), większą dokładność i integralność danych o położeniu oraz zwiększoną odporność na zakłócenia. Niemniej odbiorniki wielokonstelacyjne są bardziej złożone od jednosystemowych i projekty z ich użyciem zajmują więcej czasu projektantom.

W artykule omówiono istotne kwestie projektowe urządzeń elektronicznych z wielokonstelacyjnymi odbiornikami GNSS oraz zaprezentowano przykładowe platformy i środowiska programistyczne firm u-blox, Microchip Technology, MikroElektronika, Thales i Arduino w kontekście mobilnych aplikacji dla inteligentnych miast.
Postęp technologii nawigacji satelitarnej, a zwłaszcza coraz mniejsze wymagania energetyczne odbiorników, odegrały kluczową rolę w częstszym wykorzystywaniu systemów nawigacji i powszechnym ich użyciu w aplikacjach smart city. Średnie zmniejszenie poboru mocy przez odbiornik w ciągu dekady 2010–2020 było około pięciokrotne, tj. z 120 mW do 25 mW (rys. 1). Co więcej, zapotrzebowanie na moc zasilającą odbiornika GNSS obniżało się szybciej niż zapotrzebowanie energetyczne większości innych komponentów systemu LAS. Można przyjąć, że obecnie zapotrzebowanie na energię przez odbiornik GNSS stanowi często tylko jednocyfrowy procent całkowitego budżetu mocy urządzenia.
Problemy związane z poborem mocy
Z jednej strony pobór mocy przez odbiornik GNSS wyraźnie się zmniejszył, z drugiej strony złożoność projektowa w obszarze optymalnego rozwiązania w zakresie mocy zasilania i wydajności wzrosła. Na szczęście nie każda aplikacja wymaga ciągłego ustalania pozycji lub zapewnienia dużej dokładności jej wyznaczenia. Znając potrzeby danego rozwiązania, projektanci mają do dyspozycji różne narzędzia do optymalizacji wydajności i zużycia energii przez moduł GNSS, w tym wybór odpowiedniego modułu i konfigurację jego oprogramowania firmware.
Zastosowanie komponentów efektywnych energetycznie, a zwłaszcza tego typu niskoszumowych wzmacniaczy w.cz. (low-noise RF amplifiers, LNA), oscylatorów taktujących i zegarów czasu rzeczywistego (RTC), jest pierwszym krokiem ku zapewnieniu energooszczędności projektu. Kolejnym stopniem jest wybór między anteną aktywną i pasywną. Pasywne są tańsze i zapewniają większą efektywność, ale nie spełniają potrzeb każdej aplikacji z uwagi na duże wymiary. Aktywna antena może być dobrym wyborem w miejskiej zabudowie, wewnątrz budynków lub w innych miejscach o słabej sile sygnału. Współpracujący z nią wzmacniacz LNA znacznie zwiększa czułość odbiornika, ale także zużywa energię. Gdy pobór mocy jest krytyczny, a rozmiar anteny nie jest tak istotny, większa antena pasywna często zapewnia taką samą skuteczność jak mniejsza antena aktywna, dając jednocześnie wysoką dokładność ustalenia położenia.
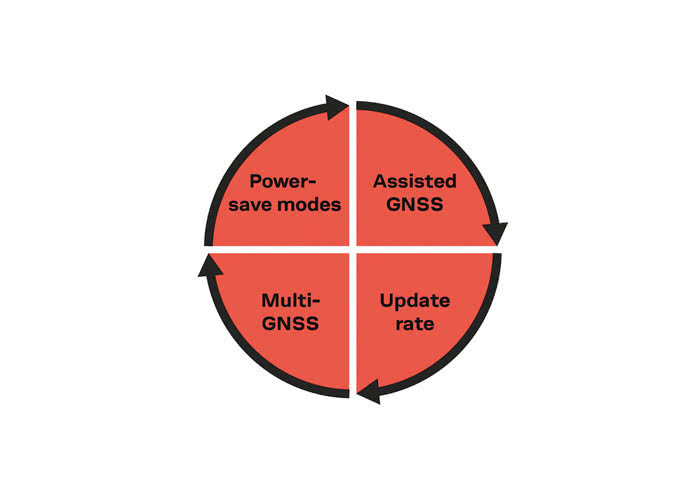
Mnóstwo odbiorników GNSS zapewnia częstotliwość aktualizacji pozycji 10 Hz lub nawet wyższą, ale większość aplikacji nie potrzebuje tak często ustalać położenia i działa równie dobrze przy znacznie wolniejszej repetycji, co przekłada się na energochłonność. Wybór optymalnej szybkości aktualizacji w praktyce ma największy wpływ na zużycie energii. Stąd oprócz oczywistego wyboru platformy sprzętowej, projektant może skonfigurować oprogramowanie firmware pod kątem optymalizacji zużycia energii, w tym szybkość aktualizacji pozycji, liczbę jednocześnie śledzonych konstelacji GNSS, ustawić tryb pracy ze wspomaganiem (Assisted GNSS) i aktywować różne tryby oszczędnościowe (rys. 2).
Gdy konieczne jest jednoczesne śledzenie wielu konstelacji GNSS po to, aby zapewnić niezawodne i szybkie wyznaczenie pozycji, taki reżym pracy zwiększa istotnie zużycie energii. Niekiedy lepiej jest zapewnić większą widoczność nieba i używać minimalnej liczby satelitów, niż śledzić wszystkie konstelacje w miejscu, gdzie widoczność jest kiepska dla podobnego efektu.
Wyłączenie śledzenia wszystkich konstelacji i zostawienie tylko jednej aktywnej oszczędza najwięcej energii, ale powoduje, że zimny start, a więc czas ustalenia pozycji po raz pierwszy (time to first fix, TTFF), może wynosić 30 s lub więcej. Wartość ta waha się w zależności od dostępności satelitów i poziomu odbieranych sygnałów, rozmiaru i umiejscowienia anteny itp. Praca GNSS ze wspomaganiem może zmniejszyć wartość TTFF, zapewniając jednocześnie dokładną pozycję.
Wynika to z tego, że odbiornik, zanim rozpocznie wyznaczanie pozycji, musi posiadać dokładne informacje na temat położenia satelitów. Standardowo dane te pobierane są z satelitów w tzw. depeszy nawigacyjnej. Jednak prędkość transmisji jest tutaj na tyle mała (50 bitów/s), że proces ten może trwać od 1 minuty (informacje o efemerydach) do 12,5 minuty (pobieranie almanachu).
Wspomaganie to można wdrożyć na kilka sposobów, w tym np. na bieżąco przewidywać informacje o stanie konstelacji (umożliwiają to dane efemeryczne), parametrach lotu satelitów (te dane nazywane są almanachem) i pobierać je z Internetu w czasie rzeczywistym lub w odstępach do kilku dni. Niektóre odbiorniki GNSS mają tzw. tryb autonomiczny, który wewnętrznie oblicza prognozy orbity GNSS, eliminując potrzebę komunikacji przez Internet. Zawsze jednak korzystanie z trybu wspomagania może wymagać okresowego włączania odbiornika w celu pobrania aktualnych danych efemeryd.
Tryby oszczędzania energii
Większość odbiorników GNSS umożliwia wiele ustawień parametrów, a więc pozwala na ustawienie kompromisu między szybkością aktualizacji położenia a zużyciem energii, w tym realizację śledzenia ciągłego, cyklicznego, włączania/ wyłączania pozycjonowania, tworzenie migawek (rys. 3). W wielu aplikacjach wybór optymalnego trybu śledzenia powinien być realizowany w zależności od bieżących warunków pracy, a system powinien automatycznie przełączać się na najbardziej energooszczędny tryb, ale zapewniając nieprzerwaną funkcjonalność.
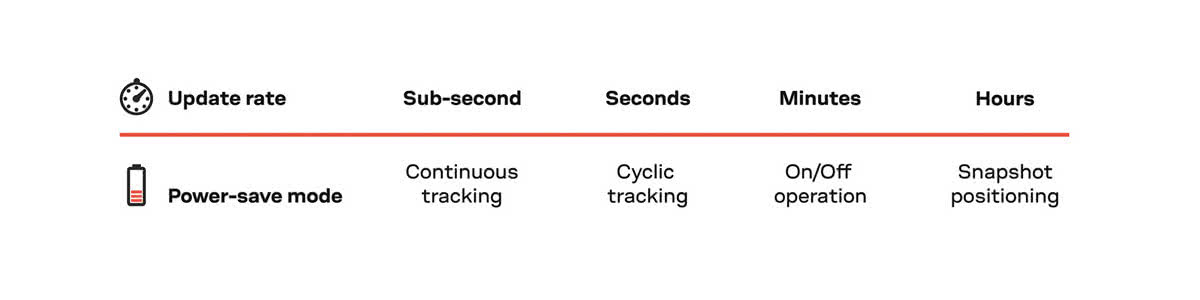
Ciągłe śledzenie jest odpowiednie dla aplikacji, które wymagają kilku aktualizacji na sekundę. W tym trybie odbiornik GNSS ustala swoją pozycję, pobiera dane almanachu i efemeryd, a następnie przełącza się w tryb śledzenia (tracking), aby zmniejszyć zużycie energii.
Cykliczne śledzenie obejmuje kilka sekund przerwy pomiędzy aktualizacjami pozycji i jest przydatne, gdy antena i jej umiejscowienie zapewnia dobry odbiór sygnału, aby zapewnić dobrą dostępność w razie potrzeby. Dodatkowe oszczędności energii można osiągnąć, jeśli śledzenie nie wymaga wyszukiwania nowych satelitów.
Praca on-off polega na cyklicznym przełączaniu działania między akwizycją danych i śledzeniem pozycji a trybem uśpienia. Czas w stanie uśpienia wynosi zazwyczaj kilka minut, niemniej sprawna operacja włączania/wyłączania wymaga odbierania silnych sygnałów GNSS, aby zminimalizować czas TTFF, a tym samym zużycia energii po każdym wybudzeniu.
Pozycjonowanie z użyciem migawek oszczędza energię dzięki wstępnemu lokalnemu przetwarzaniu sygnału z odbiornika GNSS oraz dalszej obróbce w chmurze. Gdy dostępne jest połączenie internetowe, pozycjonowanie z użyciem migawek może zmniejszyć zużycie energii przez odbiornik GNSS nawet dziesięciokrotnie. To rozwiązanie może być skuteczne, gdy urządzenie potrzebuje tylko kilka aktualizacji pozycji dziennie.
Wbudowana antena wielopasmowa
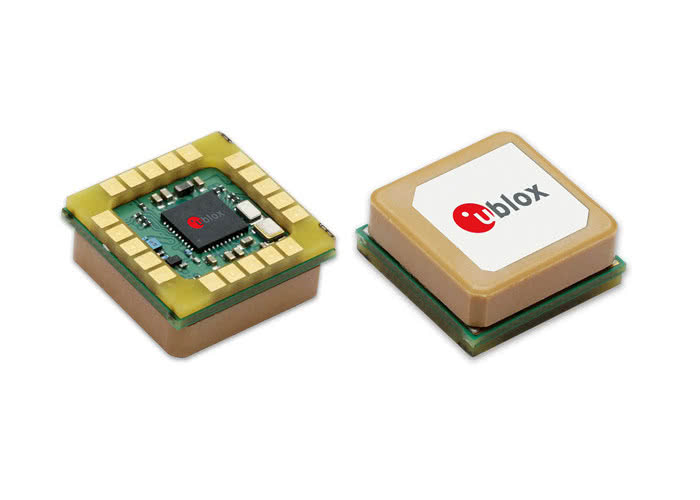
Aby skorzystać ze wszystkich konstelacji satelitarnych, moduł lokalizacyjny powinien mieć antenę wielopasmową. Przykładem takiego rozwiązania może być SAM-M8Q firmy u-blox obsługujący GPS, Galileo i Glonass (rys. 4) w oparciu o wbudowaną antenę ceramiczną typu patch. Korzystanie z trzech konstelacji jednocześnie zapewnia dużą dokładność wyznaczania pozycji w trudnych warunkach widoczności nieba, takich jak gęsta zabudowa miejska lub gdy odbierane sygnały są słabe. Aby przyspieszyć pozycjonowanie i poprawić dokładność, SAM-M8Q ma funkcje rozszerzające, w tym Quasi-Zenitalny System Satelitarny (QZSS), rozszerzoną nawigację GEO wspomaganą GPS (GAGAN), systemy rozszerzające IMES oraz WAAS. Obsługiwane są ponadto europejski system augmentacji satelitarnej EGNOS oraz japoński MTSAT (MSAS).
Moduł SAM-M8Q może również korzystać z usługi u-blox AssistNow, która dostarcza parametry GNSS, w tym dane efemeryd, almanach oraz aktualny czas i przybliżoną pozycję, aby znacznie zmniejszyć wartość czasu TTFF. Dane te mają dwie kategorie ważności: AssistNow Offline (do 35 dni) i AssistNow Autonomous (do 3 dni), ale zapewniają skrócenie czasu TTFF nawet po dłuższym czasie nieaktywności.
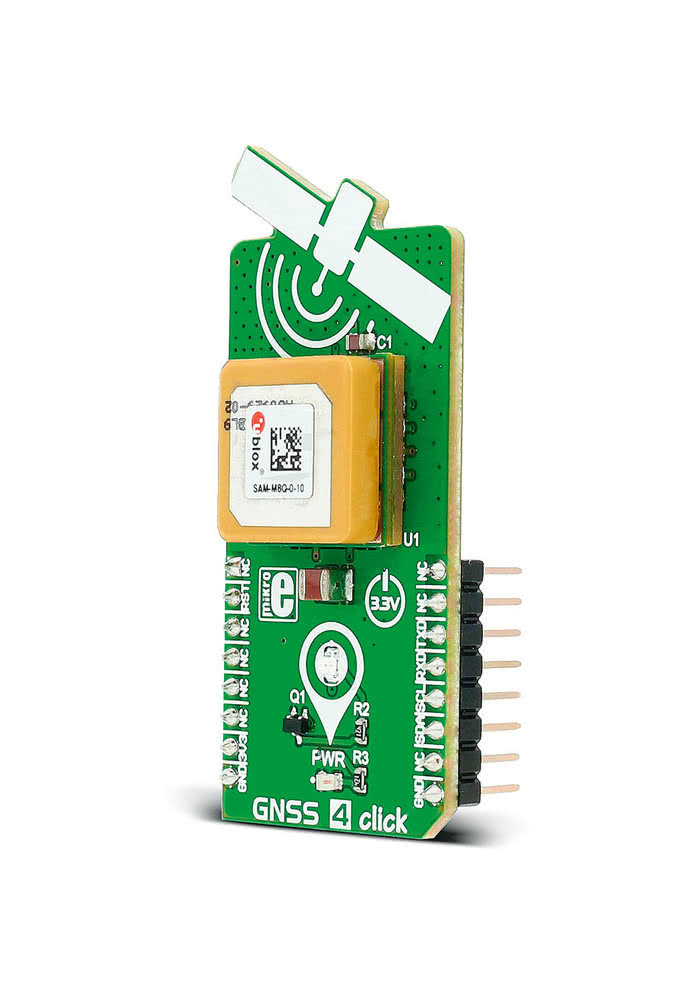
Opisany moduł zawiera nakładkowa płytka ewaluacyjna GNSS 4 click firmy MikroElektronika, która jest przeznaczona do pracy z zestawem projektowym PIC-IoT WG firmy Microchip Technology jako baza do tworzenia aplikacji smart city (rys. 5). Platforma PIC-IoT WG zapewnia użytkownikom Google Cloud IoT możliwość szybkiego tworzenia bezpiecznych aplikacji połączonych z chmurą, w tym rozwiązań bazujących na analizie danych w procesie uczenia maszynowego (ML).
Obsługa wielu konstelacji oraz łączność bezprzewodowa
Moduł Cinterion TX62 firmy Thales przeznaczony jest do pracy w małych urządzeniach, takich jak trackery. Zapewnia on obsługę wielu konstelacji satelitarnych (GPS/Galileo/Glonass) i jednocześnie realizuje komunikację w sieciach LPWAN LTE (Cat. M1/NB1/NB2 Rel. 14) – rysunek 6. Bazująca na nim aplikacja może działać w oparciu o zasoby modułu, a więc wykorzystując zintegrowany procesor, co eliminuje konieczność dodawania dodatkowego zewnętrznego elementu sterującego, zapewnia tańszą realizację i małe gabaryty. TX62 obsługuje tryb oszczędzania energii 3GPP (power saving mode, PSM) i tzw. rozszerzony odbiór nieciągły (extended discontinuous reception, eDRx) dla aplikacji o ograniczonych zasobach energetycznych. W PSM czas uśpienia jest zwykle znacznie dłuższy niż w eDRX, dzięki czemu moduł może uruchomić głębszy tryb dezaktywacji działania, a więc o niższym poborze mocy niż w eDRX. Pobór prądu w trybie PSM wynosi poniżej 10 μA, a w trybie eDRX nie przekracza 30 μA.

Funkcje bezpieczeństwa dostępne w TX62 obejmują bezpieczne przechowywanie kluczy i obsługę certyfikatów w celu wspierania zaufanej rejestracji urządzeń na platformach chmurowych, przy jednoczesnej ochronie danych, a także zaufanych tożsamości wstępnie zintegrowanych z katalogiem głównym TX62 podczas produkcji. W razie potrzeby projektanci użyli opcjonalnej zintegrowanej karty eSIM, która ułatwia logistykę produktu oraz zwiększa elastyczność użycia dzięki możliwości zdalnej obsługi subskrypcji usług powiązanych z modułem.
Kolejną propozycją jest moduł nakładkowy Portenta Cat. M1/NB IoT GNSS (rys. 7) przeznaczony do współpracy z wydajną platformą Arduino Portenta. Wykorzystuje on opisany powyżej moduł TX62 IoT i razem taki zestaw zapewnia dużą wydajność obliczeniową, komunikację w sieci komórkowej oraz nawigację, co jest kompletnym zestawem funkcjonalności niezbędnych do rozwoju aplikacji śledzenia zasobów i zdalnego monitorowania w obszarze inteligentnych miast, przemyśle, rolnictwie i innych. Płytka nadkładkowa nie zawiera anteny GSM/UMTS, ale można do niej dokupić kompatybilną wodoodporną antenę dipolową pięciopasmową.

Wydzielenie modułu komunikacyjno- -nawigacyjnego do osobnej płytki nakładkowej pozwala na zmienianie standardu komunikacji i nawigacji bez dalszej konieczności modyfikacji płytki aplikacyjnej. Każdą gotową aplikację IoT działającą na Portencie można ulepszyć o funkcje nawigacyjne oraz komunikacyjne w standardzie NB-IoT, CAT M1. Płytka ma małe wymiary 66×25,4 mm i pracuje w zakresie temperatur od –40 do +85°C.
Podsumowanie
Postęp w rozwoju technologii wydajnych i efektywnych energetycznie odbiorników GNSS napędza rozwój aplikacji inteligentnych miast. Oczywiście użycie w projekcie najbardziej energooszczędnego modułu jest niezbędne w rozwiązaniach zasilanych z baterii, ale równie ważna jest konfiguracja oprogramowania firmware, aby uzyskać optymalny balans między poborem mocy, częstotliwością aktualizacji danych i dokładnością pozycjonowania. Wiele platform ewaluacyjnych i modułów rozszerzeń z odbiornikami GNSS ułatwia tworzenie aplikacji LAS opartych na GNSS i warto z nich korzystać w pracach rozwojowych.

Digi-Key Electronics
https://www.digikey.pl/













