
Fale radiowe są w systemach RTLS wykorzystywane do transmisji danych między ich sprzętowymi komponentami, jakimi są znaczniki umieszczane na śledzonych obiektach oraz odbiorniki, które są rozmieszczane w obrębie obszaru objętego zasięgiem systemu, na przykład na ścianach i słupach. Wyróżnia się też część programową. Oprogramowanie umożliwia przeliczanie pozyskanych danych na aktualne położenie monitorowanego obiektu. Oprócz analizy odpowiada ono też za gromadzenie i wizualizację tych informacji. Precyzja, z jaką zostaje ustalona lokalizacja obiektu, zależy od wielu czynników, w tym: liczby nadajników i odbiorników, specyfiki techniki transmisji, warunków w otoczeniu, w jakim system RTLS pracuje, obecności przeszkód między nadajnikami i odbiornikami, występowania interferencji z innymi sygnałami.
Systemy lokalizowania w czasie rzeczywistym śledzą położenie ludzi i zasobów. Nadajniki dla tych pierwszych mają przeważnie postać odznak, opasek na nadgarstek, na kostkę, klipsów do paska i na kask. Monitorując przepływ osób w obiekcie, można poprawić wydajność pracy i bezpieczeństwo personelu, na przykład kontrolując dostęp do stref niebezpiecznych. Jeżeli chodzi o zasoby to m.in. w magazynach, fabrykach i szpitalach śledzona jest lokalizacja zapasów, produktów i sprzętów, do których mocuje się nadajniki. Ułatwia to zarządzanie wyposażeniem, które w rozległych obiektach łatwo się gubi albo może zostać skradzione, kontrolę stanu zapasów w magazynie i monitorowanie postępów w produkcji.
Scenariusze wykorzystania RTLS
Popularnym zastosowaniem systemów lokalizacji w czasie rzeczywistym jest kontrola dostępu. W takim przypadku odbiorniki umieszcza się w punktach kontrolnych, na przykład przy drzwiach, a RTLS odnotowuje ich przekraczanie przez oznakowane nadajnikami osoby i zasoby. W ten sposób wykrywa się próby nieautoryzowanego dostępu do chronionych pomieszczeń, a zarazem śledzi się przemieszczanie obiektu. Punkty kontrolne pozwalają również na stworzenie systemu lokalizacji strefowej. W takim przypadku wyznaczają one granice wydzielonych obszarów, a ich przekroczenie oznacza, że śledzona osoba lub zasób znalazł się wewnątrz strefy bądź ją opuścił.
Systemy RTLS klasyfikuje się także ze względu na zasięg, na te, które określają położenie obiektu na otwartym, rozległym terenie oraz działające lokalnie, w budynkach. Przykładem zastosowania pierwszych jest zarządzanie flotą ciężarówek w oparciu o sygnały z systemu GPS, zaś drugich – zarządzanie grupą autonomicznych robotów mobilnych w fabryce w ramach RTLS opartego na sieci Wi-Fi czy monitorowanie przepływu sprzętu medycznego w obrębie szpitala z centymetrową precyzją uzyskiwaną w transmisji ultraszerokopasmowej.
Techniki wyznaczania położenia
W systemach lokalizacji w czasie rzeczywistym wykorzystuje się różne metody ustalania położenia. Do takich zalicza się trilaterację. Jest to metoda określania lokalizacji na podstawie odległości, a więc w inny sposób niż w przypadku triangulacji.
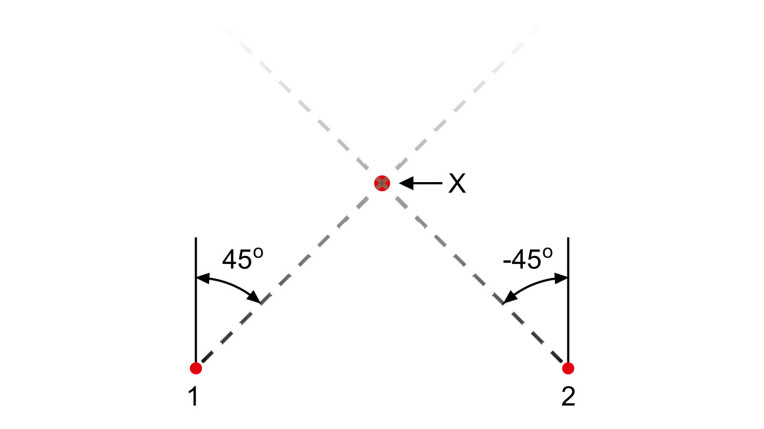
W tej ostatniej położenie punktu wyznacza się w miejscu przecięcia linii poprowadzonych pod określonymi kątami. Wyjaśnia to rysunek 1 – jeżeli wiemy, że punkt X, którego lokalizację chcemy ustalić, znajduje się pod kątem 45° względem punktu 1 oraz –45° względem punktu 2, to miejsce przecięcia linii o takim nachyleniu musi wskazywać na położenie punktu X. W trilateracji zamiast kątów wykorzystuje się odległości. W takim przypadku wymagane są co najmniej trzy punkty odniesienia, aby ustalić lokalizację obiektu. Wyjaśnia to rysunek 2.
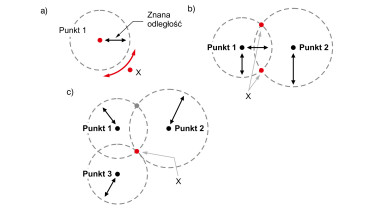
Jak wynika z rysunku 2a, jeżeli znamy odległość do jednego punktu odniesienia, możliwe poszukiwane położenia tworzą okrąg dookoła niego. Punkt X może się wówczas znajdować w jakimkolwiek miejscu na jego obwodzie.
Przy dwóch punktach odniesienia (rys. 2b) wiemy, że punkt X musi znajdować się w jednym z dwóch miejsc, w których okręgi o promieniach równych odległości do punktów referencyjnych się przecinają. Bez trzeciego punktu odniesienia nie można jednak jednoznacznie wskazać, które z nich jest tym poszukiwanym. Jeżeli jednak znamy odległości od trzech punktów odniesienia, punkt X musi się znajdować w miejscu, w którym wszystkie trzy okręgi się przecinają (rys. 2c).
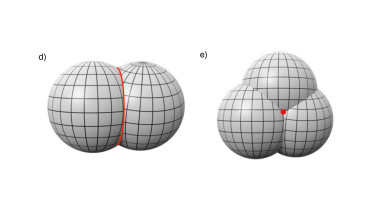
W przestrzeni 3D zamiast okręgów mamy sfery. Te też przecinają się, w przypadku dwóch punktów odniesienia – na obwodzie okręgu (rys. 2d), a trzech – w dwóch miejscach, po jednym z każdej strony (rys. 2 e). Jedno z nich, zależnie od przyjętego układu odniesienia, jest odrzucane.

TOA, TDOA, TOF, RSSI
W bazujących na trilateracji metodach TOA (Time Of Arrival) oraz TDOA (Time Difference Of Arrival) położenie też ustala się na podstawie odległości między obiektem a punktami odniesienia. Dystanse te są obliczane w oparciu o pomiar, w technice TOA – czasu transmisji sygnału między obiektem a punktem odniesienia, zaś w TDOA – różnic czasów transmisji w parach obiekt – punkt referencyjny.
W obu przypadkach wykorzystuje się technikę ToF (Time of Flight), w której zmierzony czas jest przeliczany na odległość przez pomnożenie przez prędkość propagacji sygnału. W metodzie TOA lokalizacja obiektu jest znajdowana w punktach przecięcia się okręgów (albo sfer) ze środkami w punktach referencyjnych i o promieniach równych odległościom do obiektu. W TDOA natomiast są to miejsca przecięcia się hiperbol (lub hiperboloid) z ogniskami w punktach referencyjnych.
W RLTS wykorzystuje się też metodę PDoA (Phase Difference of Arrival), która pozwala określić kierunek, z którego nadawany jest sygnał (Angle Of Arrival, AoA). W tym celu wymagane są co najmniej dwie anteny w odbiorniku. Wówczas może on zmierzyć różnicę faz odbieranych sygnałów, co po odpowiednich przeliczeniach pozwala wyznaczyć kąt AoA.
Popularna jest również technika TWR (Two – Way Ranging). Dystans między urządzeniem o znanej lokalizacji a tym, które znajduje się w nieokreślonej odległości, jest w tym przypadku wyznaczany na podstawie pomiaru czasu, jaki zajmuje impulsom pomiarowym przejście tam i z powrotem pomiędzy nimi.
Metoda oparta na pomiarze wskaźnika RSSI (Received Signal Strength Indicator) pozwala z kolei obliczyć odległość między nadajnikiem a odbiornikiem w zależności od mocy odbieranego sygnału. Istnieje wiele algorytmów pozycjonowania, które wykorzystują to podejście. Przykładowy bazuje na modelu matematycznym strat mocy sygnału w zależności od dystansu. Przykładowy wzór, który je opisuje, to:
P = A − 2B log(d)
gdzie: P – moc sygnału odbieranego, d – odległość pomiędzy nadajnikiem a odbiornikiem, A, B – parametry modelu, uwzględniające specyfikę kanału transmisji oraz nadajnika. Popularność metody opartej na RSSI wynika z jej prostoty, ale ma ona niestety ograniczoną dokładność.

Nawigacja zliczeniowa
Nawigacja zliczeniowa (dead reckoning) to tradycyjna metoda polegająca na wyznaczaniu bieżącej pozycji na podstawie wcześniejszej lokalizacji w oparciu o informacje o prędkości oraz kierunku, w jakim obiekt się przemieszcza. Na precyzję obliczeń wpływ mają wszystkie te składniki. Kluczowe znaczenie ma dokładność ustalenia lokalizacji początkowej – błędy w jej określaniu kumulują się wraz z przebytą odległością. Stale monitorowana i dokładnie mierzona powinna być też prędkość, a nawet niewielkie odchylenia od właściwego kierunku mogą prowadzić do znaczących błędów na długich dystansach.
Podstawowe obliczenia w metodzie nawigacji zliczeniowej opierają się na zależnościach pomiędzy drogą, prędkością, czasem i kierunkiem. Są zatem stosunkowo proste.
Kolejna pozycja jest obliczana poprzez aktualizację poprzedniej na podstawie odległości przebytej w określonym kierunku. Jeśli obiekt porusza się w linii prostej, na przykład na północ lub południe, należy po prostu do początkowej lokalizacji dodać albo odjąć od niej przebytą odległość obliczoną na podstawie prędkości, z jaką się on porusza i czasu, który upłynął od opuszczenia poprzedniej pozycji. Jeżeli kierunek jest odchylony względem osi północ–południe i wschód-zachód to kąt tej odchyłki powinien zostać w obliczeniach uwzględniony. W tym celu należy skorzystać z odpowiednich zależności trygonometrycznych. Żeby poprawić dokładność obliczeń, w nowoczesnych implementacjach tej techniki wykorzystuje się zaawansowane algorytmy, na przykład filtr Kalmana.
Co wyróżnia sygnały UWB?
W systemach RTLS wykorzystywane są różne techniki i standardy transmisji bezprzewodowej, jak UWB, Bluetooth Low Energy, Wi-Fi i systemy GPS. Pierwszy z wymienionych znacząco wyróżnia się na tle konkurencji.
Po pierwsze, sygnały UWB zajmują szerokie pasmo częstotliwości, rzędu kilkuset MHz – GHz, w porównaniu z sygnałami wąskopasmowymi. Poza tym w przeciwieństwie do innych technologii radiowych, w transmisji UWB do kodowania informacji nie stosuje się modulacji amplitudy ani częstotliwości. Zamiast tego wykorzystuje się krótkie sekwencje bardzo wąskich impulsów (o czasie trwania 2 nanosekundy) i modulację BPSK (Binary Phase-Shift Keying) i/albo BPM (Burst Position Modulation). Oprócz tego moc sygnałów UWB została ograniczona, by nie zakłócała sygnałów wąskopasmowych nadawanych w tym samym nielicencjonowanym pasmie częstotliwości – dopuszczalna widmowa gęstość mocy sygnałów ultraszerokopasmowych jest na poziomie porównywalnym z poziomem szumów.
Dzięki tym właściwościom technologia transmisji ultraszerokopasmowej ma liczne zalety, które wyróżniają ją na tle innych technik komunikacji bezprzewodowej. Są to przede wszystkim: duża szybkość przesyłu danych, małe opóźnienia, odporność na interferencje i wpływ zjawiska wielodrogowości na jakość transmisji, mały pobór mocy, małe wymagania sprzętowe oraz koszt. Jeśli chodzi o te ostatnie, to wynikają stąd, że w nadajniku nie jest potrzebny wzmacniacz mocy, który zwykle jest też jego najbardziej energochłonnym komponentem, podobnie jak nie ma także potrzeby korzystania z bloku mieszacza częstotliwości. Używa się poza tym małych anten.
Ograniczona moc sygnałów UWB przynosi dodatkowe korzyści poza oszczędnością energii. Przede wszystkim mało prawdopodobny jest podsłuch transmisji ultraszerokopasmowej, ze względu na małą moc emitowanego sygnału, przechwycenie danych jest bowiem trudne i wymaga bliskości z nadajnikiem. Ważne jest również bezpieczeństwie użytkowników – moc impulsów UWB jest znacznie mniejsza, nawet kilkanaście tysięcy razy niż moc nadajnika w typowym telefonie komórkowym.
Warto ponadto wspomnieć o dużej przenikalności sygnału UWB przez przeszkody bez tłumienia. Efektywnie wykorzystuje on też dostępne pasmo częstotliwości.

UWB w RTLS
W systemach pozycjonowania sygnały UWB zapewniają większą dokładność. Jest ona rzędu kilku centymetrów z niezawodnością 99,9% w normalnych warunkach operacyjnych, zaś w trudnych środowiskach, takich jak hale fabryczne, wynosi kilkadziesiąt centymetrów z niezawodnością 95%. Dla porównania RTLS oparte na Wi-Fi i Bluetooth LE typowo gwarantują precyzję rzędu kilku metrów przy niezawodności 95%, i to w ściśle kontrolowanym środowisku, która znacznie się pogarsza w razie wystąpienia uciążliwych czynników w otoczeniu. Aby na przykład w przypadku Bluetooth LE uzyskać precyzję poniżej metra, wymagane jest użycie dużej liczby odbiorników oraz zapewnienie bezpośredniej widoczności nadajników (Line of Sight, LoS).
Przewaga ta wynika ze specyfiki impulsowych, szerokopasmowych sygnałów UWB. Dzięki ich właściwościom obliczenia czasu przelotu ToF są dokładniejsze i możliwe jest utrzymanie precyzji nawet w miarę zwiększania się odległości między urządzeniami i w przypadku braku bezpośredniej widoczności (non-LoS). Dla porównania, wyniki uzyskiwane metodą pomiaru wskaźnika mocy sygnału RSSI, na której bazują Bluetooth, Bluetooth LE i Wi-Fi, są podatniejsze na uciążliwe czynniki środowiskowe, takie jak zakłócenia i przeszkody.
Kluczową kwestią w systemach lokalizacji w czasie rzeczywistym są opóźnienia. Zależą one od dokładności, niezawodności i szybkości transmisji i ilości przetwarzanych danych. Dzięki bardzo krótkim pakietom i możliwości implementacji techniki TDMA (Time Division Multiple Access) sygnały UWB zapewniają bardzo małe opóźnienia sprzętowe, typowo od kilku do kilkudziesięciu milisekund. Duża dokładność i niezawodność oznaczają z kolei, że do wyznaczenia odległości potrzebny jest tylko jeden lub kilka pomiarów. Przekłada się to na jeszcze krótsze opóźnienia na poziomie aplikacji.
Ze specyfiki UWB wynika też mniejsze zużycie energii opartych na nich systemów RTLS. Składają się na to takie cechy, jak: transmisja impulsowa, krótkie pakiety danych i duża szybkość transmisji danych (do 27/31 Mb/s zgodnie ze specyfikacją standardu IEEE 802.15.4z), dzięki którym do przesłania tej samej ilości danych potrzeba mniej czasu (i energii) niż w przypadku Bluetooth LE.
Monika Jaworowska









