
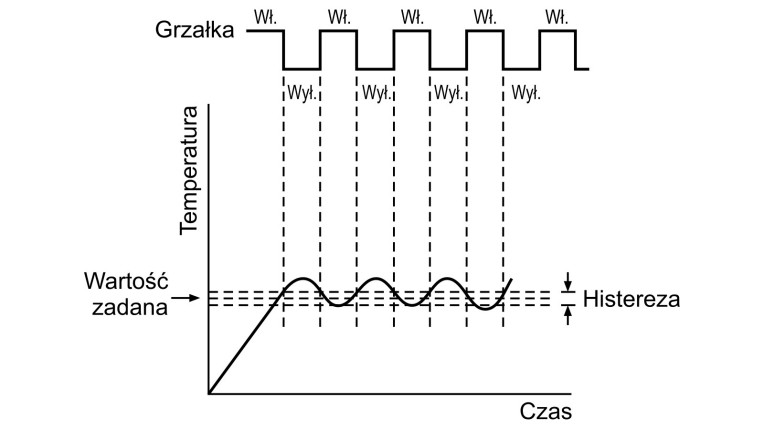
Regulacja dwustanowa (włącz/wyłącz, on/off) to najprostszy sposób sterowania temperaturą. W podejściu tym element wykonawczy, na przykład grzałka, jest przełączany między tylko dwoma stanami pracy: działaniem z pełną mocą i całkowitym wyłączeniem. Nie ma stanów pośrednich ani możliwości płynnej zmiany mocy – regulacja odbywa się wyłącznie przez zmianę częstości włączeń i wyłączeń i czasu trwania obu stanów. Przełączenie między nimi następuje, jeżeli wartość temperatury zmierzonej w pętli sprzężenia zwrotnego różni się od wartości zadanej.
Jeżeli temperatura docelowa jest niższa – grzałka jest włączana, a jeśli wyższa – zostaje wyłączona. Temperatura zmienia się zatem cyklicznie, od wartości poniżej tej zadanej do wartości od niej wyższej i odwrotnie. Jeżeli obiekt sterowania bardzo szybko się nagrzewa i schładza, przełączenia takie są bardzo częste. To z kolei może być niekorzystne dla elementów przełączających i członów wykonawczych. Oprócz tego im szybsza jest reakcja obiektu sterowania, tym można się spodziewać większego przeregulowania i niedoregulowania. By temu zapobiec, wprowadza się histerezę (strefę nieczułości). Jest ona wyrażana jako procent wartości docelowej.
Dzięki histerezie temperatura, przy której grzałka jest włączana, różni się od tej, przy której zostaje wyłączona. Jeżeli przykładowo strefa nieczułości wynosi 1%, a temperatura zadana to +500°C, przy histerezie ±5°C, element grzewczy zostanie włączony, kiedy temperatura spadnie poniżej +495°C. Stan ten będzie trwał, dopóki temperatura nie wzrośnie powyżej +505°C. Wówczas grzałka zostanie wyłączona do czasu, aż obiekt sterowania znów schłodzi się do +495°C.
Zalety i wady
Regulacja dwustanowa jest stosowana, jeżeli: precyzyjna kontrola temperatury nie jest konieczna, w przypadku, gdy z powodu dużej bezwładności cieplnej obiektu sterowania jego temperatura zmienia się bardzo wolno, wówczas gdy częste przełączenia grzanie–chłodzenie w celu płynnej regulacji temperatury nie są możliwe i wtedy, gdy przekroczenie wartości progowej temperatury ma aktywować alarm. To podejście ma zarówno wady, jak i zalety.
Jest proste – regulator nie wymaga strojenia, wystarczy ustawić wartość docelową i histerezę, dzięki czemu regulacja dwustanowa jest tania w realizacji i niezawodna. Z drugiej strony, nie zapewnia płynnej kontroli – grzałka pracuje zawsze z maksymalną mocą albo wcale, co może skutkować większym zużyciem energii. Kolejny problem to wprawdzie ograniczone przez histerezę, ale nieuniknione wahania temperatury. Jeżeli histereza nie zostanie dobrana odpowiednio, przełączenia mogą być za rzadkie albo zbyt częste w stosunku do potrzeb oraz możliwości. By zniwelować ograniczenia tej metody m.in. wprowadza się opóźnienia, czyli minimalny czas włączenia/wyłączenia grzałki. Korzysta się również z sygnału PWM, aby regulować czas włączenia elementu grzewczego w każdym cyklu. Można w ten sposób wpływać na jego średnią moc, co pozwala oszczędzić energię. Mniejsze są też wówczas wahania temperatury.
Regulatory PID
Najszersze zastosowanie w regulacji temperatury mają algorytmy PID. Popularność zawdzięczają uniwersalności, stosunkowo prostej implementacji, dokładności i stabilności utrzymania wartości zadanej. Z drugiej strony, wymagają strojenia. Mimo to są wykorzystywane zarówno w prostych układach grzewczych, jak i w kontroli przebiegu zależnych od temperatury procesów w przemyśle.
Regulator PID składa się z trzech członów: proporcjonalnego P, całkującego I i różniczkującego D. Każdy z nich wykonuje inną operację matematyczną na uchybie. Wyniki ich działania są sumowane. Wyznaczony w ten sposób sygnał wyjściowy regulatora steruje na przykład grzałką. Odpowiednio dobierając parametry poszczególnych członów, można wpływać na odpowiedź obiektu sterowania, aby na przykład ograniczyć oscylacje lub zmniejszyć przeregulowanie. Każda sekcja regulatora PID pełni inną funkcję.
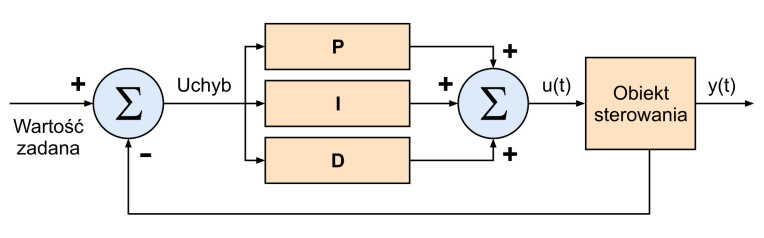
Człon proporcjonalny reaguje na aktualną różnicę między wartością zadaną i zmierzoną. Im uchyb jest większy, tym silniejsza będzie odpowiedź regulatora, która ma temu błędowi przeciwdziałać. Wzmocnienie członu P skaluje sygnał, który jest przekazywany z powrotem do obiektu sterowania, proporcjonalnie do wartości uchybu. Dobór tego parametru jest kluczowy dla szybkości reakcji oraz jakości regulacji. Generalnie w razie zwiększenia wzmocnienia proporcjonalnego regulator szybciej reaguje na zmiany. Z drugiej strony, jeżeli będzie za duże, wystąpią oscylacje, można się spodziewać przeregulowania i ostatecznie destabilizacji układu regulacji. Jeżeli jednak wzmocnienie będzie za małe, reakcja regulatora będzie zbyt wolna. Zasadniczo człon P nigdy całkowicie nie wyeliminuje uchybu ustalonego, czyli błędu, który pozostaje, kiedy układ regulacji osiągnie równowagę.
Człony I i D
Człon całkujący z kolei sumuje (całkuje) uchyb w czasie. Jego głównym zadaniem jest likwidacja stałej różnicy między wartością zadaną i rzeczywistą. Człon I dąży do tego celu, dodając do sygnału wyjściowego regulatora wartość, która jest proporcjonalna do sumy błędów chwilowych. W efekcie nawet jeżeli są małe, ale utrzymują się przez dłuższy czas, ich skumulowana wartość będzie rosła. To wymusi silniejszą odpowiedź regulatora, który będzie systematycznie korygował uchyb ustalony aż do jego całkowitego wyeliminowania. Człon całkujący działa wolniej niż proporcjonalny. Zbyt duża wartość jego wzmocnienia szybko skutkuje przeregulowaniem.
Człon różniczkujący natomiast reaguje na szybkość zmian błędu, czyli na to, jak prędko uchyb się zwiększa albo maleje. W praktyce jego funkcją jest przewidywanie przyszłego zachowania układu regulacji i tłumienie gwałtownych zmian, aby ograniczyć oscylacje, przeregulowanie i nie dopuścić do sytuacji, w której ze względu na szybko zmieniający się błąd regulator, który będzie próbował na niego jak najszybciej zareagować, straci stabilność. Niestety człon D wzmacnia zakłócenia (szumy), na przykład sygnału pomiarowego. W regulatorach temperatury, szczególnie w przypadku obiektów sterowania o dużej bezwładności termicznej, zwykle wpływ członu różniczkującego na wypadkowy sygnał sterujący ogranicza się do minimum.
Metody strojenia
W zakresie strojenia regulatorów PID stosowane są różne podejścia. Jednym z nich jest dobór parametrów poszczególnych członów metodą prób i błędów. Zwykle rozpoczyna się od wyłączenia członów całkującego i różniczkującego – najpierw dobiera się wzmocnienie członu P. Początkowo stopniowo się je zwiększa, obserwując odpowiedź układu regulacji. Jeżeli jest zbyt wolna, dalej się ten parametr zwiększa, natomiast w razie wystąpienia nadmiernych oscylacji albo utraty stabilności wzmocnienie członu P trzeba zmniejszyć.
Jeżeli jego wartość zapewnia wymaganą szybkość reakcji, dołącza się człon D, aby zmniejszyć oscylacje. Jego strojenie polega na stopniowym skracaniu czasu całkowania – im jest mniejszy, tym szybciej będzie malał uchyb ustalony, co jest głównym celem w tym kroku. Niestety, zmniejszaniu się błędu ustalonego towarzyszy zwykle zwiększanie się przeregulowania. To ostatnie w jakimś stopniu jest zawsze nieuniknione, by zapewnić akceptowalny czas reakcji regulatora.
W razie uzyskania pożądanego uchybu ustalonego należy dobrać czas różniczkowania członu D pod kątem ograniczenia przeregulowania. Metoda prób i błędów pozwala na szybkie dostrojenie układu regulacji, bez znajomości modelu obiektu sterowania. Z drugiej strony, skuteczność tego podejścia jest uzależniona od doświadczenia osoby dobierającej parametry dla poszczególnych członów i nie zawsze udaje się je ustawić optymalnie. Lepsze wyniki można osiągnąć, stosując usystematyzowaną metodę Zieglera-Nicholsa. Oprócz tego w nowoczesnych sterownikach dostępna jest funkcja automatycznego dostrajania regulatora PID (autotuning).

Logika rozmyta
Logika rozmyta (fuzzy logic) to metoda wnioskowania, która pozwala opisywać stany pośrednie i podejmować decyzje na podstawie nieprecyzyjnych danych. Podejście to jest zbliżone do ludzkiego sposobu rozumowania. W związku z tym w regulatorach rozmytych nie jest wymagany dokładny model obiektu regulacji, a logikę sterowania formułuje się w postaci prostych reguł językowych. Dzięki temu regulatory te "reagują intuicyjnie" i elastycznie dostosowują się do złożonych oraz zmieniających się warunków.
W praktyce logika rozmyta stanowi rozszerzenie klasycznej logiki binarnej. Wprowadzono w niej nowe pojęcie stopnia przynależności zmiennej do zbioru. Dzięki temu, w przeciwieństwie do logiki dwuwartościowej, w której zmienna może przyjmować jedynie wartość 1 (prawda) albo 0 (fałsz), logika rozmyta dopuszcza stany pośrednie pomiędzy prawdą a fałszem. Mogą one przyjmować dowolną wartość z przedziału [0, 1]. W przypadku regulacji temperatury pozwala to na rozróżnianie nie tylko stanów: gorąco i zimno, ale także na przykład: trochę ciepło, bardzo zimno, umiarkowanie gorąco, trochę chłodno. W związku z tym, o ile opierając się na logice binarnej na pytanie: czy jest gorąco, możemy uzyskać jedną z dwóch odpowiedzi: tak (1) albo nie (0), to w przypadku logiki rozmytej dopuszczalne są też stwierdzenia: bardzo gorąco (0,9), trochę gorąco (0,4), niezbyt gorąco (0,2).
Zbiory i reguły
Kluczową koncepcją w logice rozmytej są zbiory rozmyte. Różnią się one od klasycznych tym, że dopuszczają częściową przynależność, a nie jedynie ścisłe włączenie albo wykluczenie. W tych pierwszych element należy do zbioru (wartość przynależności = 1) lub do niego nie należy (wartość przynależności = 0), zbiory rozmyte uwzględniają natomiast stopnie przynależności reprezentowane przez wartości od 0 do 1. Ważny termin to też funkcja przynależności mapująca wartości wejściowe na stopień przynależności do zbioru. Przykładowo, w celu ustalenia, czy temperatura jest wysoka, funkcja przynależności przypisuje jej wartość od 0 (bardzo niska) do 1 (bardzo wysoka). Logika rozmyta opiera się ponadto na regułach if – then wyrażających relacje między danymi wejściowymi i wyjściowymi w sposób rozmyty. Przykładowo, jeżeli temperatura jest umiarkowanie wysoka, wtedy prędkość obrotów wentylatora powinna być średnia. Reguły te są przetwarzane w ramach wnioskowania rozmytego obejmującego: ocenę stopnia prawdziwości każdej z nich, połączenie ich wyników przy użyciu operacji logicznych i generowanie rozmytego wyjścia, które jest następnie konwertowane na wartość ostrą.
Bloki funkcyjne
Regulator rozmyty składa się w związku z tym z czterech komponentów. Są to bloki: rozmywania (fuzyfikacji), bazy reguł (wiedzy), silnika wnioskowania oraz wyostrzania (defuzyfikacji) (rys. 3).
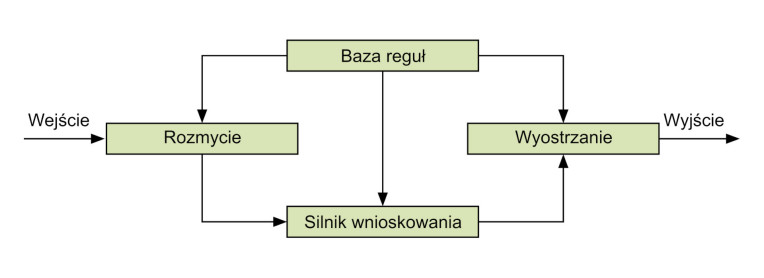
W pierwszym konkretne wartości wejściowe, mierzone na przykład przez czujniki temperatury, są konwertowane na wartości rozmyte przez określenie stopnia ich przynależności do poszczególnych kategorii, będących zbiorami rozmytymi, na przykład: zimno, ciepło. Przykładowo temperatura +22°C może zostać rozmyta do wartości 0,8, jeżeli chodzi o przynależność do zbioru ciepło i 0,2 – do zbioru zimno. Baza wiedzy zawiera zestaw reguł if – then i funkcji przynależności, które zostały opracowane przez ekspertów z danej dziedziny. Silnik wnioskowania odpowiada za ocenę stopnia dopasowania pomiędzy rozmytymi danymi wejściowymi i ustalonymi regułami w celu uzyskania rozmytych wartości wyjściowych. Te w bloku wyostrzania zostają skonwertowane z powrotem na pojedynczą liczbową wartość umożliwiającą wysterowanie elementu wykonawczego. Taką może być procent mocy grzałki. Najlepiej działanie regulatorów rozmytych, których przykładowym zastosowaniem są inteligentne termostaty w systemach automatyki domowej, wyjaśnić na przykładzie.

Przykład
Załóżmy, że zadaniem regulatora mocy grzałki jest utrzymanie temperatury w pokoju na poziomie +22°C. Jeżeli różnica między temperaturą zadaną a zmierzoną jest dodatnia, oznacza to, że jest za zimno i pomieszczenie trzeba dogrzać. W przeciwnym razie jest za ciepło, więc trzeba ograniczyć grzanie. Zmienną wyjściową w tym układzie jest moc grzania wyrażana jako procent maksymalnej mocy grzałki (0% – 100%). Wartości błędu można przypisać do następujących zbiorów rozmytych: duży ujemny (bardzo gorąco), mały ujemny (lekko za gorąco), zero (w sam raz), mały dodatni (lekko za zimno) i duży dodatni (bardzo zimno). Wykresy przykładowych funkcji przynależności dla poszczególnych zbiorów przedstawiono na rysunku 4. Wynika z nich, że błąd +3°C należy głównie do zbioru duży dodatni, +0,5°C – częściowo do mały dodatni, częściowo do zero, a –4°C głównie do duży ujemny. Każda reguła if – then w bazie przypisuje moc grzania w zależności od rozmytej wartości błędu.
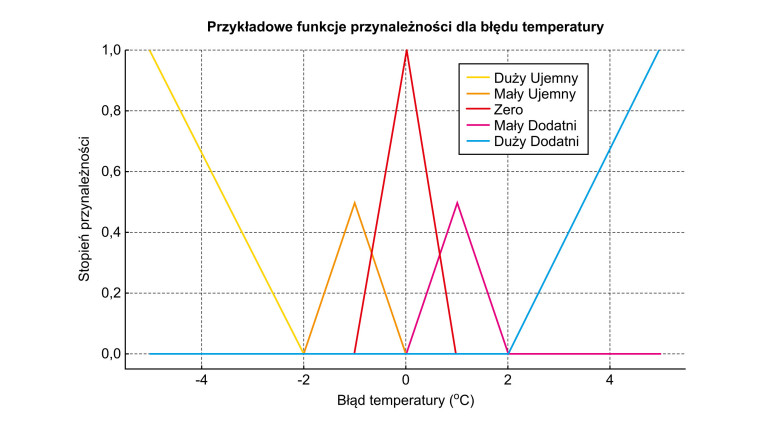
Przykładowe reguły to: błąd duży dodatni → moc grzania bardzo wysoka, mały dodatni → średnia, zero → niska, mały ujemny → bardzo niska, duży ujemny → 0 (wyłącz grzałkę). Jeżeli przykładowo błąd temperatury wynosi +0,5°C, na podstawie stopni przynależności 0,3 i 0,5 zostanie zakwalifikowany do kategorii odpowiednio mały dodatni i zero. Na etapie wnioskowana jednocześnie muszą zostać wzięte pod uwagę reguły dla obydwu tych zbiorów. Każdemu przypisana jest określona moc grzania, na przykład 50% dla mały dodatni i 20% dla zero. Na etapie wyostrzania oblicza się średnią ważoną mocy, przypisując wagi odpowiadające stopniowi przynależności. W związku z tym mamy:
moc grzałki = (0,3 · 50% + 0,5 · 20%) / 0,3 + 0,5 = 31,25%.
Nowoczesne algorytmy
Na wybór algorytmu regulacji temperatury wpływ mają przede wszystkim wymagania w zakresie precyzji, szybkości i stabilności regulacji, przy uwzględnieniu dostępnych zasobów obliczeniowych. W praktyce często stosuje się podejście hybrydowe, na przykład łącząc regulator PID z logiką rozmytą. Upowszechniają się też metody adaptacyjne. W odróżnieniu od klasycznych regulatorów o niezmiennych parametrach, te automatycznie dostosowują swoje ustawienia w czasie rzeczywistym, w odpowiedzi na zmiany zachodzące w obiekcie sterowania i zakłócenia zewnętrzne. W podejściu predykcyjnym z kolei zmiany te są modelowane zawczasu, co pozwala na podejmowanie decyzji odnośnie do sterowania z wyprzedzeniem. Algorytmy regulacji oparte na AI z kolei są w stanie rozpoznawać złożone zależności między zmiennymi wpływającymi na efekt sterowania i same pod ich kątem się modyfikować, by uzyskać jak najlepsze wyniki. Przykładem wykorzystania tych najbardziej zaawansowanych metod regulacji jest inteligentne zarządzanie temperaturą w centrach danych.
Monika Jaworowska










