
Rozpraszanie sygnału zegarowego
Oprócz wymienionych parametrów rozpraszania widma spotyka się jeszcze jeden, zależny od konkretnej aplikacji opisujący profil rozproszenia widma.
Center spread jest terminem określającym kształt (profil) rozproszenia wokół nominalnej częstotliwości wejściowej. Częstotliwość jest modulowana mniej więcej w takim samym zakresie powyżej, jak i poniżej częstotliwości nominalnej. Taka modulacja jest odpowiednia do wielu zastosowań, ale w niektórych przypadkach częstotliwości sygnału zegarowego nie można już zwiększyć (skrócić okresu sygnału). Musi być wówczas zastosowane rozpraszanie w dół zamiast rozpraszania wokół. Jak sama nazwa wskazuje, rozpraszanie w dół rozprasza częstotliwość nominalną w taki sposób, że górna częstotliwość graniczna sygnału rozproszonego jest równa częstotliwości nominalnej. Przykładowo, zegar 100 MHz z rozproszeniem 1% w dół będzie rozproszony w paśmie od 99 do 100 MHz.
Rozpraszanie wokół może być użyte w aplikacjach, w których takiego ograniczenia nie ma, należy jednak zwrócić uwagę na inny aspekt. Intuicyjnie, średnia częstotliwość sygnału zegarowego rozproszonego wokół jest równa częstotliwości przed rozproszeniem. Niestety, jest tak tylko w przybliżeniu. Z tego powodu SSC nie może być użyte w aplikacjach wymagających dużej dokładności częstotliwości, takich jak np. układy synchronizacji. Przykładowo, średnia częstotliwość sygnału z rozproszeniem 1% może różnić się o 500 ppm od częstotliwości przed rozproszeniem. Ten błąd wynika z braku symetrii rozproszenia wokół częstotliwości podstawowej.
Innym zagadnieniem aplikacyjnym jest jitter sygnału zegarowego. Jitter okresowy jest najprościej rzecz biorąc opisem zmienności okresu sygnału. Ponieważ okres jest ściśle zależny od częstotliwości, 1-procentowa zmiana częstotliwości oznacza 1-procentową zmianę długości okresu. Jak już wspomniano, najczęściej spotykany problem stanowią te aplikacje, w których wymagane są minimalne długości okresu (najczęściej w celu zapewnienia timingu w logice synchronicznej).
Rozpatrzmy sygnał zegarowy o częstotliwości nominalnej 100 MHz i 1-procentowym rozproszeniu. W tym przypadku międzyszczytowe zmiany okresu wynoszą 100 ps. Ten jitter pochodzi tylko od rozpraszania i zakłada idealny sygnał zegarowy przed rozpraszaniem. Aby w przybliżeniu ocenić jitter rzeczywistego sygnału zegarowego po rozproszeniu, należy do wartości 100ps dodać jego jitter własny.
Jitter całkowity oraz jitter fazy odnoszą się do maksymalnego przesunięcia jakiegokolwiek zbocza rozpatrywanego sygnału zegarowego względem sygnału idealnego o tej samej częstotliwości średniej. Ponieważ zmiana fazy jest całką zmian częstotliwości (pochodna zmian częstotliwości jest fazą), jasne jest, że rozpraszanie widma sygnału zegarowego zwiększa jitter fazy. Rozpraszanie widma nie nadaje się do zastosowań, w których poziom jitteru fazowego lub całkowitego jest istotny, np. w wyświetlaczach analogowych.
Innym często specyfikowanym rodzajem jitteru jest jitter międzyokresowy (cycle to cycle jitter). Definiuje się go jako maksymalną różnicę długości sąsiednich okresów sygnału. Z reguły sygnały są modulowane, a częstotliwość modulacji o wiele mniejsza niż częstotliwość nośna. Potrzeba więc nawet tysięcy cykli sygnału zegarowego na jeden pełny okres sygnału modulowanego. Z tego powodu można przyjąć, że rozpraszanie widma nie pogarsza jitteru międzyokresowego.
Niezależnie od jitteru, niektóre aplikacje nie nadają się do rozpraszania widma sygnału zegarowego. Przykładem mogą być szeregowe interfejsy, takie jak USB, Ethernet czy SONET. W tych zastosowaniach wymaga się bardzo dużej dokładności częstotliwościowej sygnału zegarowego wynikającej z konieczności minimalizacji stopy błędów. Wyjątkiem jest tu PCI Express i SATA, które tolerują szerszy zakres zmian częstotliwości zegarowej, ograniczając jednocześnie zakres modulacji. Osobnym zagadnieniem jest zastosowanie rozproszonego sygnału zegarowego w układzie pętli fazowej (PLL). Układ ten działa w ten sposób, że w stanie synchronizmu generuje sygnał wyjściowy o identycznej fazie w stosunku do sygnału wejściowego. Częstotliwość sygnału wyjściowego może być całkowitą lub niecałkowitą wielokrotnością sygnału wejściowego. Pętla fazowa jest systemem o charakterystyce dolnoprzepustowej.
Układ pętli śledzi wolne zmiany sygnału wejściowego, ale z oczywistych powodów nie może nadążyć za zmianami o częstotliwościach wyższych niż jego pasmo przepustowe (różnice pomiędzy fazą sygnału wejściowego i wyjściowego mogą nie być stałe). Z tego powodu działanie każdego układu pętli fazowej, na którego wejście podano sygnał zegarowy z rozproszonym widmem, powinno być sprawdzone. W najgorszym przypadku, wąskopasmowy układ PLL lub z małym marginesem fazy może mieć trudności z osiąganiem stanu synchronizmu, jeśli sygnał wejściowy zmienia się zbyt szybko. Bardziej prawdopodobne jest jednak, że błędy fazy układu PLL spowodują zmianę zależności czasowych pomiędzy sygnałami w otaczających układach. Istnieje jednak wiele aplikacji wykorzystujących pętlę fazową, w których pobudzanie sygnałem zegarowym z rozproszonym widmem jest nie zauważalne.
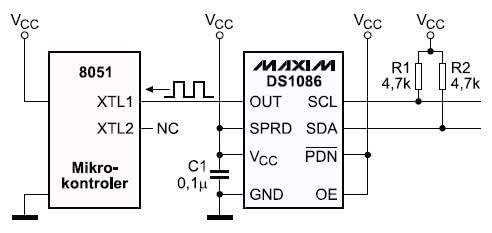
Rys.5. Zastosowanie układu generatora zamiast oscylatora kwarcowego
Nie ma niestety prostego kryterium oceny tego, czy dany rozproszony sygnał zegarowy może być stosowany w danym układzie pętli fazowej. Na dynamiczną charakterystykę sygnału rozproszonego ma wpływ wiele czynników, takich jak częstotliwość modulacji, kształt sygnału modulującego oraz jego amplituda. Na dodatek, różne aplikacje wykazują zróżnicowaną tolerancję na błędy fazy układu PLL. Z tych powodów najprostszy i intuicyjny wskaźnik - porównanie częstotliwości modulacji sygnału zegarowego oraz pasma pętli fazowej - daje tylko przybliżoną informację o możliwości współdziałania sygnału zegarowego z rozproszonym widmem i pętli fazowej.











