Przeniki sygnałów
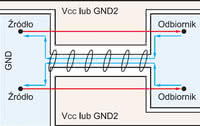
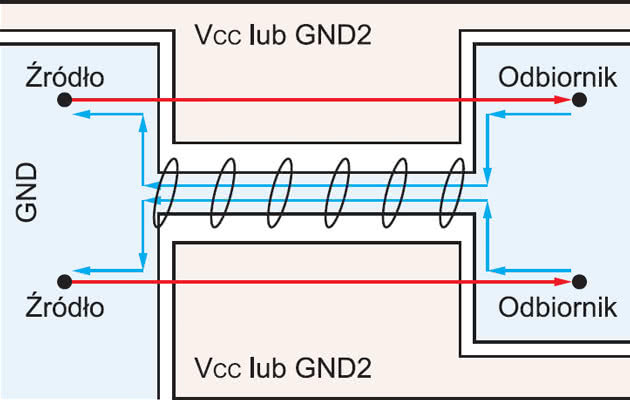
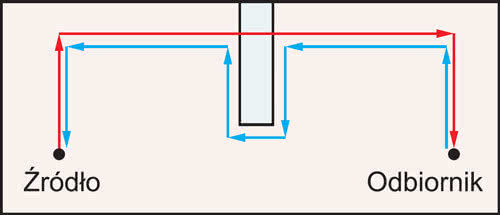
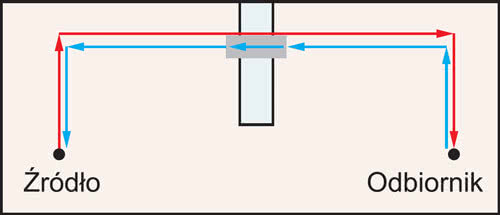
Rys. 5. Pasożytnicze sprzężenie prądów powrotnych powstałe w wyniku zwężenia połączenia masy. Droga sygnałów - linia czerwona, prądy powrotne - linia niebieska
Rys. 5. Pasożytnicze sprzężenie prądów powrotnych powstałe w wyniku zwężenia połączenia masy. Droga sygnałów - linia czerwona, prądy powrotne - linia niebieska
Przeniki sygnałów (crosstalk) należą do nieuniknionych efektów spotykanych w praktyce inżynierskiej. Występują nie tylko na płytce drukowanej czy w wiązce przewodów, ale też w środku układów scalonych. Na szczęście można je ograniczyć do poziomu niewpływającego na poprawność pracy systemu. Ścieżki szybkich sygnałów rozważa się jako elementy o stałych rozłożonych.
Nie da się zastąpić linii długiej żadnym elementem skupionym, ale za to można ją przybliżyć łańcuchem złożonym z elementów skupionych. Wykorzystuje się tu fakt, że ścieżka o długości l oraz połączenie łańcuchowe n ścieżek o długości dz=l/n są zawsze równe. Jeśli długość elementu dz jest dostatecznie krótka, sygnał nie jest już traktowany jako sygnał szybki.
Element dz może być zamodelowany przez elementy skupione: rezystory, kondensatory i indukcyjności. Przykład modelu dla dwóch bezstratnych, sprzężonych przewodników pokazano na rysunku 4. Pierwszy z przewodników modelowany jest przez l1-c1, a drugi przez l2-c2. Sprzężenia pomiędzy przewodnikami oznaczone są symbolami cm (sprzężenie pojemnościowe) i lm (indukcyjne). Sygnał propagujący przez jeden z przewodników na skutek obu wymienionych sprzężeń wytwarza w drugim przewodniku prąd płynący w przeciwną stronę.
W przypadku linii mikropaskowej, niebędącej linią jednorodną, prąd od sprzężenia indukcyjnego dominuje nad prądem wstecznym od sprzężenia pojemnościowego. Aby efekt sprzężenia zminimalizować, należy zachować wspomniany wcześniej minimalny odstęp pomiędzy liniami. Bardzo ważne jest również poprowadzenie masy. Na rysunku 5 pokazano przykład błędu projektowego.
Zachowany jest co prawda odpowiedni odstęp między liniami sygnałowymi (linie czerwone), ale nie ma należytej separacji prądów powrotnych (linie niebieskie). W efekcie powstało sprzężenie pomiędzy sygnałami i wytworzyła się pętla prądowa niebezpieczna z uwagi na możliwość powstania interferencji elektromagnetycznych.
Spadek napięcia na połączeniu masy
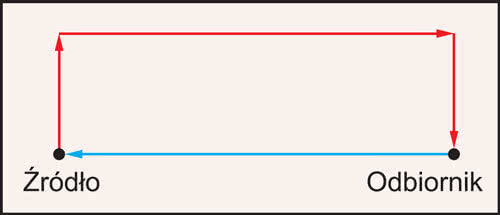
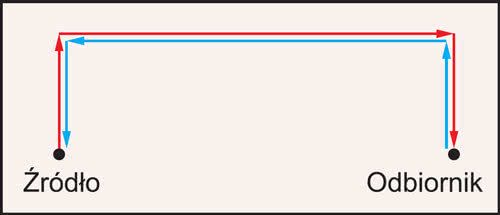
Sposób połączenia masy, czyli droga powrotna, dla sygnału ma również znaczenie. Pokazano to na rysunku 6a. W przypadku prądu stałego prądy powrotne płyną po ścieżce o najmniejszej rezystancji. Gdy częstotliwość sygnału jest większa, prąd powrotny wybiera drogę najmniejszej impedancji, która znajduje się dokładnie pod ścieżką sygnału. Jeśli, jak to pokazano na rysunku 6c oraz pod ścieżką sygnału, jest przerwa lub inna przeszkoda, prąd powrotny płynie inną drogą.
Jak wspomniano wcześniej im większe pole pętli utworzonej przez drogi prądów, tym większe ryzyko wystąpienia problemów z interferencjami elektromagnetycznymi. Najlepszym rozwiązaniem jest unikanie jakichkolwiek przerw w połączeniu masy bezpośrednio pod ścieżką sygnału. Jeśli jest to niemożliwe, można zmienić sposób prowadzenia ścieżki sygnałowej lub "zaślepić" dziurę bezpośrednio pod ścieżką sygnałową rezystorem o wartości 0Ω.
Przerwy w połączeniu masy powodują nie tylko wzrost zakłóceń elektromagnetycznych. Pojawiająca się dodatkowa indukcyjność na połączeniu przewodu powrotnego prowadzi do spadku napięcia, bardzo dotkliwego z punktu widzenia prowadzenia sygnału zegarowego. Żądamy bowiem, aby sygnał zegarowy miał strome zbocze, tzn. aby pochodna prądu po czasie di/dt była jak największa.
Spadek napięcia na indukcyjności Ldi/dt jest zatem również duży i może być poważnym problemem. Przykładowo, przyjmując czas narastania sygnału dt równy 500ps, różnicę prądu di równą 1mA oraz indukcyjność równą 10nH, otrzymamy 20mV spadku napięcia.
 |
 |
 |
 |
|
Rys. 6. Prądy powrotne na płytce drukowanej, a - droga powrotna sygnału dla prądu stałego, b - droga powrotna sygnału dla prądu przemiennego, c - wpływ przerw w masie, d - użycie rezystora 0Ω |
|||
Warto zapamiętać, że każdy milimetr bieżący ścieżki na płytce drukowanej to około 1nH indukcyjności. Aby ograniczyć spadki napięcia na indukcyjności masy, oprócz wydzielonych obszarów należy stosować kondensatory blokujące. Powinny one zapewnić niską impedancję AC pomiędzy zasilaniem a masą. Powinny być podłączone do każdego aktywnego układu jak najbliżej jego wyprowadzeń.
W ten sposób składowe sygnału zegarowego wielkiej częstotliwości są zwierane do masy i eliminowane. Jeden kondensator blokujący to jednak za mało. O wiele lepsze efekty osiąga się, stosując równoległe połączenie dwu lub kilku takich elementów. Wartości ich pojemności powinny różnić się między sobą o około dwa rzędy wielkości, np. 10nF i 100pF. Kondensator o mniejszej wartości powinien być umieszczony bliżej wyprowadzeń układu w celu ograniczenia wpływu indukcyjności ścieżek.
Dobrze jest jednak zawsze zostawić miejsce na płytce na dodatkowe kondensatory, w różnych typach obudów. Kondensatory pomagają również zminimalizować wpływ szumów w napięciu zasilania. Ważne jest również, aby kondensatory znajdowały się na drodze sygnału tak, jak to pokazano na rysunku 7. Końcówki kondensatora powinny być podłączone bezpośrednio przelotkami do wydzielonych warstw (obszarów) masy i zasilania.
Zastosowanie dwu lub trzech przelotek pozwoli dodatkowo zmniejszyć rezystancję i indukcyjność połączenia. Tylko gdy odległość do pinu masy układu scalonego jest wystarczająco mała, można kondensator podłączyć do niego bezpośrednio.
Dzięki temu można zaoszczędzić trochę miejsca na płytce drukowanej. Przelotki są niestety duże w porównaniu z rozmiarami kondensatorów w obudowie 0402 i nie mogą być umieszczone zbyt blisko siebie. Często więc przed projektantem staje problem rozstrzygnięcia, co w tym wypadku jest właściwsze: umieszczenie kondensatora jak najbliżej wyprowadzeń układu scalonego kosztem impedancji doprowadzeń, czy też odwrotnie.
Dystrybucja sygnału zegarowego
W praktycznych zastosowaniach wiele bloków funkcjonalnych urządzenia taktowanych jest zegarem o tej samej częstotliwości. Sygnał ten trzeba więc rozprowadzić po całym systemie elektronicznym. Wszystkie omówione wcześniej zalecenia projektowe są dalej aktualne. Dodatkowo ważny jest również sposób połączenia układów odbiorczych.
Najgorsze rozwiązanie, jakie można zastosować, pokazano na rysunku 8a. Występują tu duże odbicia od rozgałęzień linii sygnału zegarowego. Ponadto długość linii dochodzącej do układów nie jest równa. Prowadzi to do różnicy czasów opóźnienia sygnału i w efekcie może być przyczyną błędnego działania urządzenia.
Aby wyeliminować odbicia od odnóg linii zegarowej, należy je zlikwidować, jak to pokazano na rysunku 8b. W tym przypadku sygnał zegarowy jest poprowadzony w formie łańcucha od jednego układu do następnego, a na końcu linii dołączone jest sztuczne obciążenie dopasowujące. W tym rozwiązaniu należy zwrócić uwagę na opóźnienie sygnału, które ma decydujące znaczenie przy bardzo szybkich sygnałach zegarowych.
Można je wyliczyć z elektrycznej długości linii. W przytoczonym przykładzie może się okazać, że dane wysłane z układu A do B będą już nieaktualne w momencie dotarcia do B aktywnego zbocza sygnału zegarowego. Różnice w czasie propagacji można wyeliminować poprzez zastosowanie architektury typu gwiazda z rysunku 8c. Metoda ta wymaga zastosowania centralnego drivera sygnału zegarowego. Poszczególne wyjścia tego układu są źródłem sygnału zegarowego dla oddzielnych bloków funkcjonalnych.
Projektant powinien zapewnić identyczne opóźnienia poprzez taką samą długość ścieżek wszystkich linii zegarowych pomiędzy driverem a blokami funkcjonalnymi. Bardziej skomplikowany system pokazano na rys. 8d. Zegar główny podłączony jest do kilku driverów. Tak samo jak w poprzednim przypadku należy zadbać o tę samą długość ścieżek oraz o prawidłowe dopasowanie impedancji.










