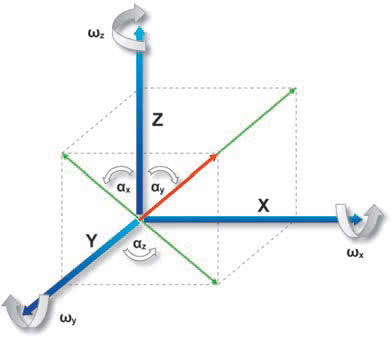
Rys. 1. Trójosiowe sensory kątowej prędkości obrotowej umożliwiają wyznaczenie trzech składowych wektora prędkości kątowej: ωx, ωy, ωz
Każdy wielowirnikowiec zbudowany jest z ramy zapewniającej odpowiednią sztywność konstrukcji, do której zamontowane są komputer pokładowy, pakiety napędowe, kamera video transmitująca drogą radiową obraz na ziemię, odbiornik sygnału sterowania platformą nadawanego przez aparaturę zdalnego sterownia oraz regulatory silników bezszczotkowych. Silniki zamocowane są na końcówkach ramion zespolonych ze środkową częścią ramy i w połączeniu z piastami oraz śmigłami tworzą napęd wielowirnikowca.
Wielowirnikowce zachowują się podobnie do helikopterów, jednak w odróżnieniu od nich nie wymagają skomplikowanej i precyzyjnej mechaniki. Wspólną cechą wszystkich wielowirnikowców jest to, że silniki są zamontowane prostopadle w stosunku do osi ramion, dzięki czemu wytwarzają siłę ciągu prostopadłą do ziemi i skierowaną przeciwnie do siły grawitacji. Siła ciągu jest wytwarzana przez śmigła o stałym skoku. Wszystkie funkcje lotu są możliwe dzięki niezależnemu sterowaniu poszczególnych silników przez komputer pokładowy.
Platformy wielowirnikowe są bardzo interesujące głównie ze względu na prostotę konstrukcji mechanicznej, która w połączeniu z zaawansowaną technologią dają niebywałe możliwości, np. monitoringu z powietrza. Kluczowymi elementami komputera pokładowego są akcelerometry i czujniki prędkości obrotu kątowego, wykonane w technologii MEMS.
To dzięki nim możliwa jest realizację wszystkich funkcji lotu oraz zapewnienie właściwego zachowania wielowirnikowca w powietrzu, który z zasady działania jest konstrukcją niestabilną. W strukturze komputera pokładowego można wyróżnić ponadto następujące bloki: pomiarów analogowych, pomiaru sygnałów sterujących (z radioodbiornika), sterowania modułami wykonawczymi (silnikami, serwomechanizmami), wyznaczania orientacji przestrzennej i stabilizacji lotu.
Sensory

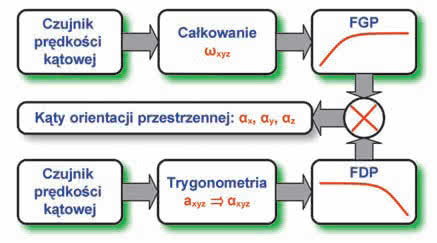
Rys. 2. Sygnały z czujników MEMS podawane są na filtr komplementarny składający się z dwóch filtrów: górno- i dolnoprzepustowego
Gdyby istniały czujniki bezpośrednio określające orientacje przestrzenną obiektu zadanie to byłoby trywialne. Tak jednak nie jest. Dostępne na rynku sensory: przyspieszeń (akcelerometry), kątowej prędkości obrotowej (żyroskopy) czy ziemskiego pola magnetycznego (kompasy), nie zapewniają w prosty sposób określenia orientacji przestrzennej. Każdy z sensorów z osobna dostarcza informacji, które pośrednio dają informacje o orientacji, jednak tylko w pewnych warunkach.
Jeśli spojrzymy na trójosiowy sensor przyspieszenia wykonany w technologii MEMS (nie może być to np. czujnik piezo gdyż nie wskazuje on grawitacji statycznej), który jest nieruchomy to łatwo zauważyć, że na podstawie wskazań z trzech osi X, Y, Z uzyskujemy informacje o wartości wektorów przyspieszeń ax, ay, az i o ich kątach αx, αy, αz. Kąty te określają orientacje sensora względem kierunku prostopadłego do ziemi. Warto tu od razu zauważyć, że może on być źródłem informacji o orientacji składowej X i Y układu współrzędnych natomiast nie daje informacji o orientacji składowej Z.
Jego możliwości są jednak bardzo duże, gdyż w układach stabilizacji lotu, najważniejsze jest właśnie wyznaczenie orientacji X i Y. Problem jednak pojawia się, gdy sensor znajduje się w stanie nieustalonym. Na przyspieszenie grawitacyjne nakłada się także przyspieszenie obiektu i pomiar orientacji przestrzennej jest praktycznie niemożliwy (rys. 1). Trójosiowe sensory kątowej prędkości obrotowej umożliwiają wyznaczenia trzech składowych wektora prędkości kątowej: ωx, ωy, ωz.
Wiadomo z matematyki, że prędkość kątowa jest pochodną kąta. Jeśli więc scałkujemy sygnały z sensora, otrzymamy informacje o kątach: αx, αy, αz. Problem jednak pojawia się, dla małych wartości prędkości kątowych oraz dla stanu, gdy obiekt jest nieruchomy. Na skutek zmian temperatury, szumów oraz skończonej cyfrowej reprezentacji sygnału z sensora, pojawia się pewna minimalna składowa stała, która po scałkowaniu objawia się dryft em.
Zjawisko jest w zasadzie bardzo trudne do eliminacji i należy pogodzić się z jego obecnością. Można jedynie próbować je minimalizować. Trójosiowy sensor ziemskiego pola magnetycznego także może być źródłem informacji o orientacji przestrzennej. W naszym położeniu geograficznym dominuje co prawda składowa pionowa wektora pola magnetycznego Z i wynosi około 0,4-0,5 gausa, to jednak istnieją także składowe poziome X i Y.
Daje to także możliwość oszacowania orientacji przestrzennej. Z pomiarem tym wiąże się jednak niebezpieczeństwo, że lokalne zawirowania ziemskiego pola magnetycznego lub pasożytnicze zakłócenia magnetyczne, mogą wprowadzić błąd w szacowaniu. Warto tu także wspomnieć o innych metodach pozyskiwania informacji takich jak analiza linii horyzontu za pomocą kamer i odpowiedniej analizy obrazów. Są one jednak bardziej zaawansowane i nie zostaną tutaj opisane.
Orientacja w przestrzeni
Rys. 3. Sposób uzyskania informacji o trzech kątach orientacji
Jeśli przyjrzymy się dwóm pierwszym pomiarom, to zauważyć można, że mają one swoje zalety oraz wady, które to razem uzupełniają się niwelując problemy poszczególnych sensorów. Zauważmy, że pomiar kąta za pomocą sensora prędkości obrotowej dostarcza wiarygodnej informacji o wszystkich kątach w przypadku, gdy obiekt obraca się. Z kolei sensor przyspieszeń daje wiarygodną informację w przypadku, gdy obiekt nie porusza się lub porusza się ruchem jednostajnym, czyli dokładnie wtedy gdy wiarygodność pomiaru z czujnika przyspieszeń jest mała.
Jeśli więc udałoby się połączyć pomiary z tych sensorów tak, by w stanach ustalonych wyznaczać kąty przy pomocy sygnałów z czujnika przyspieszeń a w przeciwnym przypadku wyznaczać je za pomocą czujnika prędkości kątowych to mielibyśmy wyznaczone dwa podstawowe kąty orientacji αx, αy względem osi pionowej Z.
Filtr komplementarny
Zadanie to może zostać wykonane za pomocą filtru komplementarnego, błędnie czasem nazywanego filtrem Kalmana. Zasada jego działania jest dość prosta. Sygnały analogowe z MEMS-ów są mierzone przez przetwornik A/C procesora w wątku pomiarowym. Dane te poddawane są wstępnej obróbce, która je uśrednia eliminując szumy oraz zakłócenia (wibracje) od napędów. Prawidłowe dane przesyłane są przez pamięć dzieloną do wątku wyznaczającego kąty orientacji przestrzennej platformy.
Jest to najważniejszy wątek komputera pokładowego, który jako jedyny jest wywoływany z gwarantowaną częstotliwością 200Hz. W wątku tym sygnały z czujników MEMS podawane są na filtr komplementarny składający się z dwóch filtrów górno- i dolnoprzepustowego. Sygnały z wyjść filtrów FGP i FDP są sumowane (rys. 2). Jeśli więc na wejście filtru dolnoprzepustowego podamy informacje o kątach wyznaczoną na podstawie czujnika przyspieszeń w trzech osiach, a na wejście filtru górnoprzepustowego informację o trzech kątach wyznaczonych na podstawie czujnika obrotu kątowego, to na wyjściu filtru uzyskamy informacje o trzech kątach orientacji.
Będzie ona pozbawiona błędu wynikłego z dryfu oraz błędu wynikłego z niemożności wyseparowania wektora przyspieszenia ziemskiego, gdy obiekt jest w ciągle zmieniającym się ruchu (rys. 3). Trudno dokładnie wskazać, jakie wartości częstotliwości odcięcia powinny mieć filtry. Filtr taki można stroić poprzez przesuwanie wartości częstotliwości odcięcia od wartości bardzo małych (tak małych, że dryft z żyroskopu przenosi się na wyjście filtru w sposób zauważalny) do większych, gdy wpływ dryftu będzie pomijalnie mały.
Nie należy jednak zwiększać znacznie częstotliwości odcięcia filtrów ze względu na błędną estymację kąta z czujnika przyspieszeń przy niestatycznym ruchu obiektu. Konstruując filtr komplementarny warto zwrócić uwagę na możliwość wystąpienia zjawiska nasycenia integratora, który całkuje sygnał z czujnika prędkości obrotowych.
Jednostka inercyjna IMU
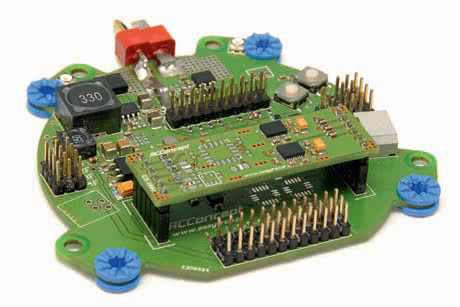
Rys. 4. Sercem komputera pokładowego easyCSDU jest mocny procesor ARM z rdzeniem Cortex M3
Filtr komplementarny wykonuje splot sygnałów z: sensora przyspieszeń i sensora prędkości obrotowej, dzięki czemu na jego wyjściu otrzymujemy sygnał, który reprezentuje kąt platformy w danej osi względem sił przyciągania ziemskiego. Po uzupełnieniu o czujnik ziemskiego pola magnetycznego oraz oprogramowanie sygnał ten daje możliwość prawidłowego wyznaczenia orientacji przestrzennej platformy niezależnie od jej położenia w powietrzu oraz od aktualnie wykonywanej funkcji lotu.
Po dodaniu z kolei modułu GPS i czujnika ciśnienia statycznego możliwa jest budowa autopilota, który może całkowicie przejąć sterowanie w powietrzu. Prace nad takim modułem już trwają. Wyznaczanie trzech kątów orientacji przestrzennej umożliwia takie sterowanie napędami, które zapewnia właściwe położenie platformy w powietrzu i realizację funkcji lotu, stabilizację jej położenia w przestrzeni i eliminację wpływu wiatru.
Sercem komputera pokładowego jest mocny procesor ARM Cortex M3 pracujący pod kontrolą opensourcowego systemu czasu rzeczywistego FreeRTOS. Czujniki MEMS zastosowane w komputerze pokładowym, to dwuosiowy czujnik prędkości obrotowej pitch i roll IDG-500 oraz jednoosiowy czujnik prędkości obrotowej yaw ISZ-500 firmy InvenSense oraz trójosiowy akcelerometr MMA7341 firmy Freescale (rys. 4).
Piotr Kleczyński, Przemysław Szulim
RCConcept - Flying Technology
www.rcconcept.pl















