
Pierwsze współczesne prace z zakresu teorii światła, dotyczące jego widma i natury, pojawiły się już w XVII wieku. Prekursorem badań w tej dziedzinie był słynny fizyk sir Isaac Newton. Za pomocą pryzmatu udało mu się dokonać rozszczepienia wiązki świetlnej, dzięki czemu zaobserwował wchodzące w jej skład światło o różnych barwach. Powiązania barwy światła z różnym poziomem energii dokonał w końcówce XIX wieku brytyjsko- niemiecki astronom i fizyk William Herschel. Zauważył również, że spektrum promieniowania świetlnego wykracza poza zakres widzialny, publikując przy tym pierwsze prace dotyczące podczerwieni. Na początku XX wieku fizycy precyzyjnie określili wiele właściwości promieniowania elektromagnetycznego i szczegółowo zbadali jego widmo. W ten sposób sformułowano również równania dotyczące związku pomiędzy promieniowaniem podczerwonym a temperaturą emitującego je ciała.
Bezkontaktowe termometry dokonują pomiaru temperatury poprzez detekcję natężenia promieniowania podczerwonego emitowanego przez badany obiekt. Zgodnie z prawami fizyki każde ciało o temperaturze powyżej zera bezwzględnego (0 K) emituje promieniowanie tego typu. W najprostszej konfiguracji detektora soczewka skupia padającą na jej powierzchnię wiązkę promieniowania i kieruje ją na obszar detekcji, gdzie energia tej wiązki konwertowana jest do postaci sygnału elektrycznego o określonych parametrach. Po wykonaniu korekty związanej m.in. z temperaturą otoczenia sygnał ten przetwarzany jest do postaci odczytu temperatury.
Metoda taka pozwala na pomiar temperatury obiektu z pewnej odległości, bez konieczności bezpośredniego kontaktu z jego powierzchnią. Urządzenia do bezkontaktowego pomiaru temperatury znajdują zastosowanie w sytuacjach, dla których wykorzystanie tradycyjnych sensorów, takich jak np. termopary, nie jest możliwe lub wystarczająco precyzyjne. W szczególności tyczy się to pomiaru temperatury małych oraz poruszających się obiektów, niebezpiecznych substancji, ciał znajdujących się w hermetycznych środowiskach (np. komora próżniowa) lub w trudnych warunkach otoczenia. Detekcja podczerwieni zapewnia też bardzo krótki czas reakcji, co pozwala dokonywać pomiarów dużo szybciej niż w przypadku rozwiązań kontaktowych.

Emisja promieniowania podczerwonego a temperatura ciała
Jak już wspomniano, każdy obiekt o temperaturze powyżej zera bezwzględnego (0 K) emituje promieniowanie z zakresu podczerwieni. Zakres ten obejmuje długości fali od 0,7 do 1000 μm. Do pomiaru temperatury wykorzystuje się jednak węższe pasmo, od 0,7 do 20 μm. Natężenie emitowanego przez obiekty promieniowania podczerwonego o długości fali powyżej 20 μm jest tak niewielkie, że na rynku nie ma obecnie układów na tyle czułych, aby były one zdolne do jego precyzyjnej detekcji. Całkowita moc promieniowania emitowanego przez powierzchnię obiektu jest proporcjonalna do czwartej potęgi wartości temperatury tej powierzchni.
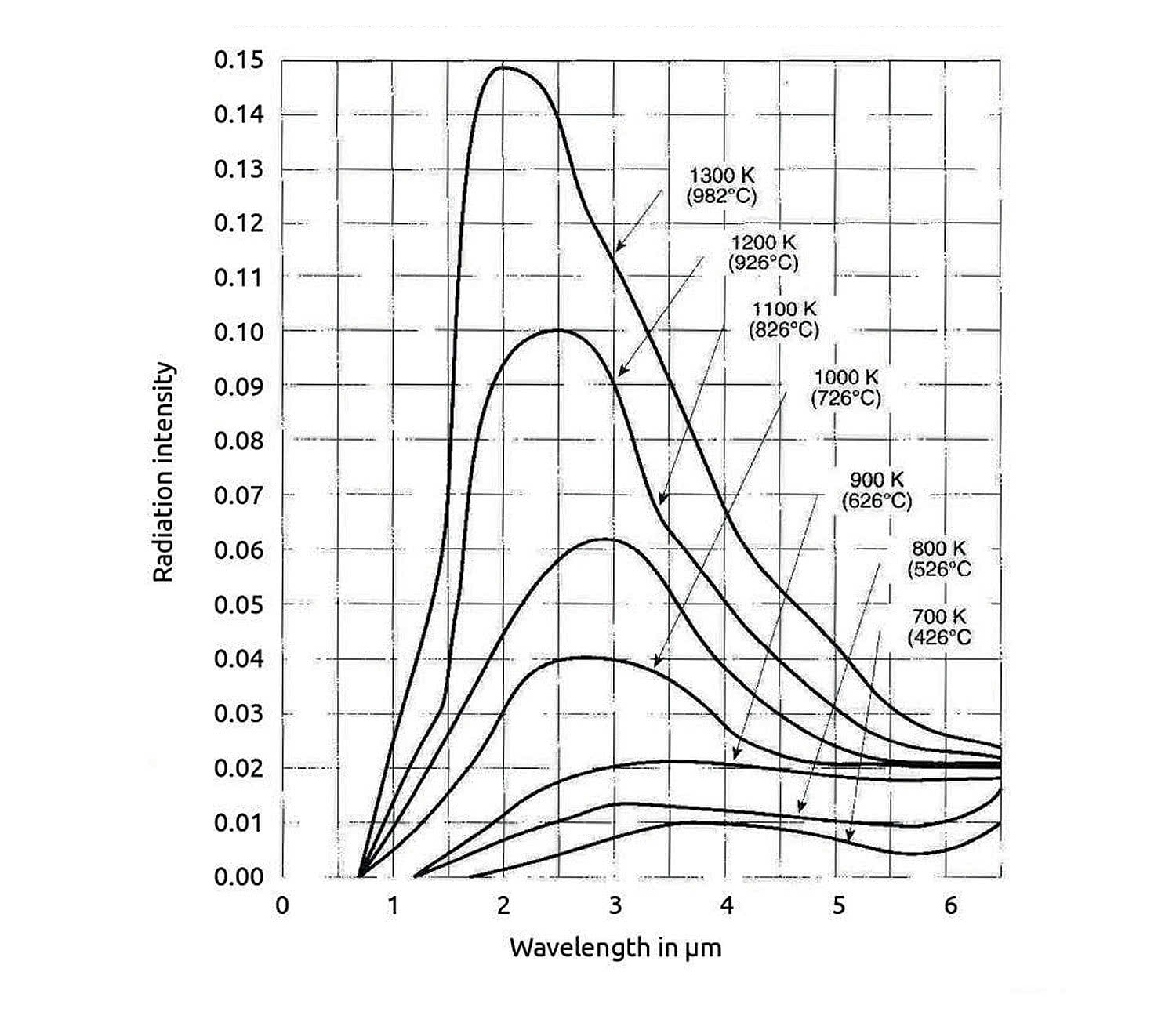
Na rysunku 2 przedstawiono zależność widma promieniowania ciała doskonale czarnego od jego temperatury. Wraz ze wzrostem temperatury rośnie wartość częstotliwości, na którą przypada maksimum energii promieniowania.
Promieniowanie podczerwone nie jest widoczne dla ludzkiego oka, jednak jego zachowanie i właściwości są bardzo zbliżone do cech światła widzialnego.
Wartość współczynnika emisyjności zależy nie tylko od materiału, z jakiego wykonany jest obiekt, ale także od właściwości jego powierzchni. Wykonany z tego samego materiału przedmiot o gładkiej i wypolerowanej powierzchni charakteryzować się będzie znacznie niższym współczynnikiem emisyjności niż jego odpowiednik o powierzchni chropowatej.
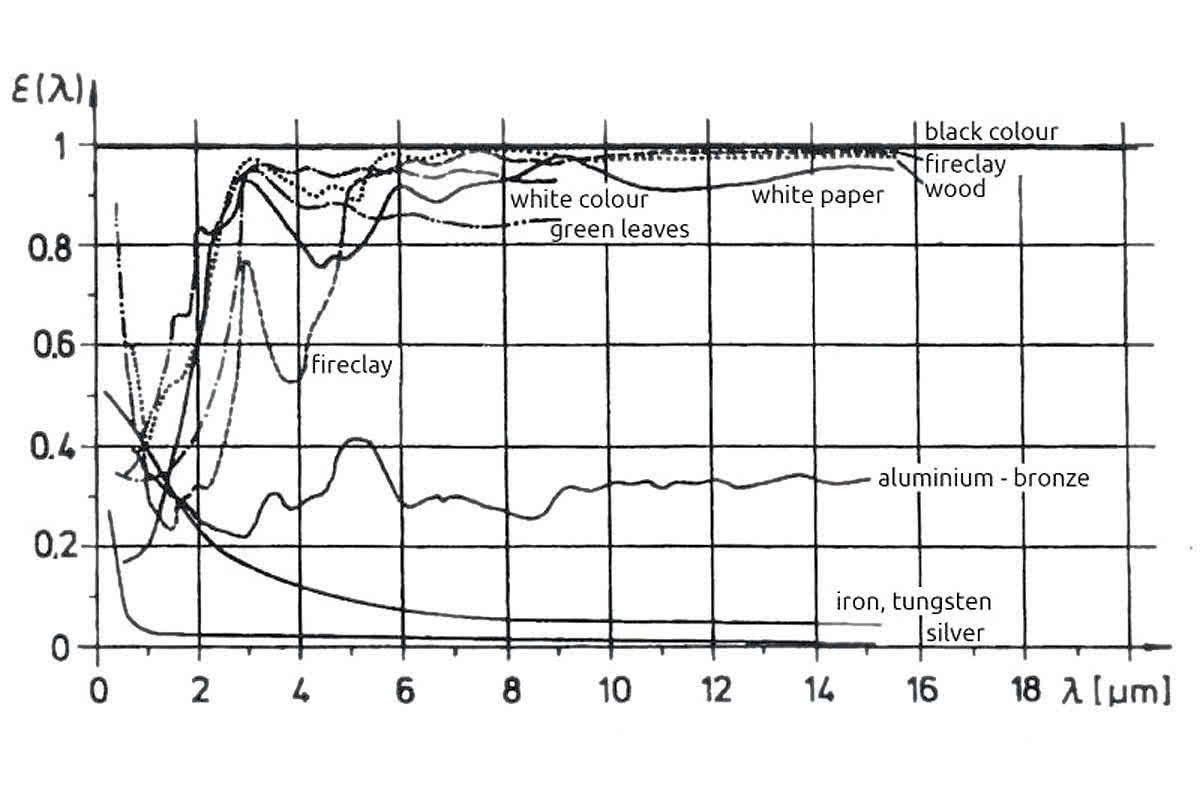
Współczynnik emisyjności określa stosunek mocy promieniowania emitowanego przez ciało rzeczywiste (w danej temperaturze i dla określonej częstotliwości promieniowania) do mocy promieniowania emitowanego w tych samych warunkach przez ciało doskonale czarne. Obiekty o stałej wartości emisyjności w całym zakresie widma promieniowania określane są mianem ciała szarego. Ciała niemające tej właściwości (jak np. metale) charakteryzują się zmiennością tego parametru w funkcji długości fali, tak jak pokazano na rysunku 4.

Ciało doskonale czarne
Wyidealizowany obiekt fizyczny zdolny do całkowitego pochłaniania padającego na niego promieniowania elektromagnetycznego określany jest mianem ciała doskonale czarnego (CDC). CDC ma współczynnik emisyjności o wartości 1. Dobrym praktycznym modelem ciała doskonale czarnego może być duża wnęka z niewielkim otworem, pokryta w środku czarną substancją (np. sadzą). Niemal cała energia promieniowania padającego na otwór jest pochłaniania przez ścianki wnęki, zaś jego współczynnik emisyjności może osiągać wartość dochodzącą nawet do 0,998.
Współczynnik emisyjności a dokładność pomiaru
Wartość współczynnika emisyjności bezpośrednio wpływa na poziom i widmo mocy promieniowania emitowanego przez obiekt, znajomość tego parametru jest zatem niezwykle istotna dla realizacji precyzyjnego pomiaru temperatury. Istnieją dwie podstawowe metody określania współczynnika emisyjności badanego obiektu. Pierwsza to metoda tabelaryczna, polegająca na korzystaniu ze znanych i skatalogowanych informacji. Druga opiera się na pomiarach porównawczych.
Wartość współczynnika emisyjności uzyskana podczas pomiarów laboratoryjnych, w określonych warunkach, nie zawsze dobrze pasuje do rzeczywistego środowiska pomiarowego, w którym obecne są różnego rodzaju zakłócenia i zniekształcenia. Dane tabelaryczne nie uwzględniają też zazwyczaj zmienności wartości parametru w funkcji częstotliwości oraz temperatury, co w efekcie prowadzić może do powstania istotnych błędów. Z drugiej strony korzystanie z gotowych wartości współczynników jest szybkie i wygodne, dzięki czemu dobrze nadaje się do realizacji przybliżonych pomiarów. W metodzie porównawczej temperatura badanego obiektu mierzona jest w pierwszej kolejności za pomocą termopary lub innego narzędzia pomiarowego. Następnie wskazania termometru bezkontaktowego kalibruje się w taki sposób, aby zrównały się z uprzednio otrzymaną wartością.
Uogólniając, większość nieprzezroczystych i niemetalicznych obiektów ma względnie wysoki i stały współczynnik emisyjności, z zakresu 0,85–0,95. Większość przedmiotów metalowych o nieoksydowanej powierzchni charakcharakteryzuje się wartością tego parametru od 0,2 do 0,5, z wyjątkiem złota, srebra oraz aluminium, których emisyjność jest jeszcze niższa. Zdolność tych metali do odbijania padającego na nie promieniowania jest tak duża, że pomiar ich temperatury za pomocą termometrów IR jest niezwykle trudny.
O ile niemal zawsze możliwe jest ustalenie współczynnika emisyjności dla konkretnego obiektu w określonych warunkach otoczenia, o tyle problemy pojawiają się przy dużej zmienności tego parametru w funkcji stanu otoczenia. Tyczy się to przede wszystkim substancji metalicznych, lecz również m.in. krzemu lub niektórych rodzajów ceramiki. Dla tego typu materiałów powinno się przeprowadzić kalibrację toru pomiarowego dla krytycznych wartości temperatury, istotnych z punktu widzenia funkcjonowania systemu.
Budowa termometru IR
Najprostszy układ termometru IR składa się z następujących komponentów:
- soczewki skupiającej padające na nią promieniowanie oraz kierującej je w stronę sensora,
- detektora, konwertującego energię promieniowania na sygnał elektryczny,
- układu korekcji wskazań z uwzględnieniem parametrów badanego obiektu, takich jak jego współczynnik emisyjności,
- układu kompensacji temperatury otoczenia.
Przez wiele lat większość dostępnych na rynku urządzeń tego typu opierała się na takiej właśnie konstrukcji. Układy te znajdowały zastosowanie w ograniczonej liczbie aplikacji, zaś dokładność ich wskazań często pozostawiała wiele do życzenia.
Współczesne termometry IR nadal oparte są na przedstawionym podstawowym schemacie konstrukcyjnym, z upływem lat został on jednak znacznie rozbudowany. Do nowych rozwiązań konstrukcyjnych zaliczyć można wykorzystanie selektywnych filtrów IR, technik wzmocnienia oraz linearyzacji sygnału, a także standaryzację wartości sygnału wyjściowego, np. w zakresach 4–20 mA lub 0–10 VDC.
Wprowadzenie selektywnej filtracji promieniowania IR jest zapewne jednym z najistotniejszych ulepszeń w konstrukcji tego typu urządzeń. Pozwala to na wykorzystanie detektorów o wyższej czułości, a także wzmacniaczy sygnałowych charakteryzujących się większą stabilnością. O ile wcześniejsze urządzenia pomiarowe bazowały na znacznie szerszym paśmie sygnału IR, o tyle nowoczesny układ tego typu może mieć pasmo pracy rzędu ok. 1 μm. W przypadku niektórych zastosowań zakres pasma pracy urządzenia może podlegać dodatkowym restrykcjom i ograniczeniom, wynikającym na przykład ze specyficznego składu atmosfery w środowisku pomiarowym.
Podczas wyboru pasma pracy układu detekcji ważnym czynnikiem jest przewidywany zakres temperatur mierzonego obiektu. Wraz ze spadkiem temperatury widmo promieniowania emitowanego przez obiekt przesuwa się w stronę wyższych częstotliwości (mniejszych długości fali). Ze względu na dokładność pomiaru w większości przypadków korzystnie jest pracować na falach o najniższej możliwej długości, a także na jak najwęższym paśmie promieniowania. Czujnik charakteryzujący się węższym pasmem pracy zawsze będzie mniej podatny na zakłócenia generowane przez otoczenie, łatwiej będzie również uzyskać stabilne parametry pracy poszczególnych elementów toru pomiarowego. Porównanie dokładności pomiaru temperatury dla różnych zakresów widmowych przedstawiono na rysunku 6.

Termometry IR
Wersje szerokopasmowe to zazwyczaj najprostsze konstrukcje do bezkontaktowego pomiaru temperatury, charakteryzujące się przy tym najniższą ceną. Pracują w zakresie od 0,3 do nawet 20 μm w szerokim zakresie temperatur np. od 0 do 1000°C lub 500 do 900°C. Są podatne na zakłócenia powodowane przez otoczenie, jak np. zapylenie, wilgotność lub zadymienie. W optymalnych warunkach, przy zastosowaniu technik korekcji i kalibracji są w stanie osiągnąć dokładność pomiaru rzędu 1%.
Układy wąskopasmowe pracują z sygnałem wejściowym o wąskim zakresie widmowym, zazwyczaj o wartości pojedynczych mikrometrów. Wybór odpowiedniego zakresu pracy pozwala na uzyskanie specyficznych właściwości systemu. Przykładowo, pasmo 8–14 μm pozwala na uniknięcie zakłóceń wprowadzanych przez cząsteczki pary wodnej obecne w atmosferze, zaś promieniowanie o długości 5 μm świetnie nadaje się do pomiaru temperatury powierzchni szklanych. Konstrukcje tego typu pozwalają na osiąganie większej dokładności pomiaru niż ich szerokopasmowe odpowiedniki, dochodzącej nawet do 0,25%.
Podsumowanie
Bezkontaktowy pomiar temperatury za pomocą detekcji promieniowania podczerwonego to skomplikowane, lecz również dość dobrze zbadane zagadnienie, podlegające ciągłemu rozwojowi i ulepszeniom. Technologia ta znajduje zastosowania w licznych dziedzinach, zarówno w przemyśle, medycynie, jak i w badaniach naukowych. Znajomość podstawowych zasad i reguł fizycznych związanych z procesem pomiarowym pozwala na uzyskiwanie satysfakcjonujących rezultatów o wysokiej powtarzalności. W tego typu systemach ważną funkcję pełni prawidłowa kalibracja oraz korekcja wskazań urządzenia, związana nie tylko z wpływem otoczenia, ale także właściwościami badanego obiektu. Niezwykle istotne są również aspekty mechaniczne oraz dbałość o utrzymanie wysokiego poziomu czystości elementów optycznych.

Damian Tomaszewski










