
Kompensacja pętli sprzężenia zwrotnego jest kluczową częścią podczas projektowania konwertera DC-DC. Jeśli obciążenie takiej przetwornicy zmienia się dynamicznie, często okazuje się, że konwerter nie działa dobrze, a napięcie wyjściowe nie jest już stabilne, co powoduje problemy z oscylacjami, przerzutami i zapadami napięcia. Zrozumienie koncepcji kompensacji pętli jest podstawową wiedzą niezbędną wszystkim projektantom zajmującym się konstrukcją systemów zasilających i nie tylko, bo prezentowane zagadnienia dotyczą wszystkich układów regulacji.
Niniejszy artykuł został podzielony na trzy części. Pierwsze dwie omawiają teorię systemu sterowania, ogólną topologię konwertera DC-DC oraz sposób projektowania pętli sprzężenia zwrotnego. W trzeciej sekcji układ MAX25206 został użyty jako przykład do zaprojektowania pętli z użyciem prezentowanych technik.
Krótkie wprowadzenie do teorii systemów sterowania
Systemy sterowania są częścią wielu urządzeń. Klimatyzatory kontrolują temperaturę w pomieszczeniu, kierowcy kontrolują kierunek swojego samochodu. Sterowanie dotyczy działania urządzenia lub fizycznej wielkości procesu produkcyjnego w celu uzyskania stałej wartości lub wartości zmiennej poruszającej się wzdłuż ustalonej trajektorii w procesie dynamicznym. Mimo że większość systemów jest nieliniowych, w przypadku małych wartościach napięć i prądów można postrzegać je jako zlinearyzowane. Podobnie jest z konwerterami i innymi układami wzmacniaczy i regulatorami.
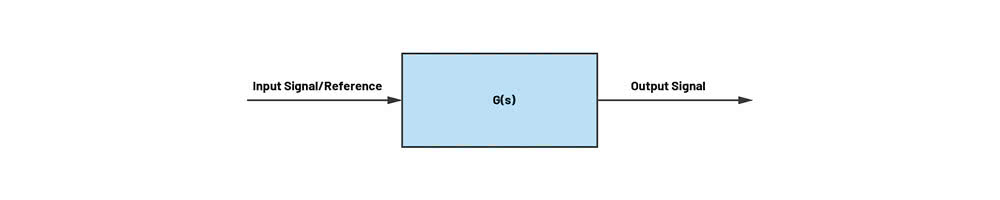
System, który realizuje automatyczną regulację, to system z zamkniętą pętlą sprzężenia zwrotnego. Jego przeciwieństwem jest system z pętlą otwartą. Cechą systemu z pętlą otwartą jest to, że sygnał wyjściowy systemu nie wpływa (nie jest powiązany) z sygnałem wejściowym, jak na rysunku 1. W takim układzie G(s) jest transmitancją w dziedzinie częstotliwości (funkcją przenoszenia) zmiennej zespolonej "s". VI to sygnał wejściowy, a VO to sygnał wyjściowy w domenie s.
VO(s) = G(s)*VI(s)
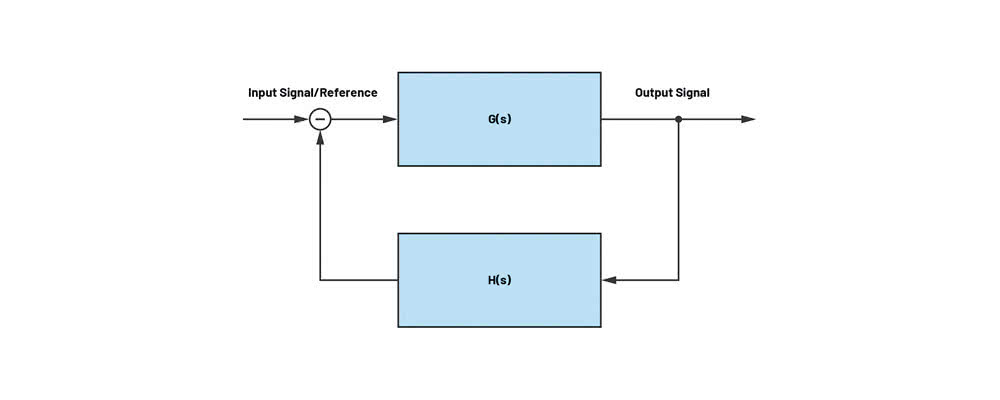
System z zamkniętą pętlą na rysunku 2 ma pętlę sprzężenia zwrotnego z wyjścia do wejścia. Sygnał wejściowy systemu jest różnicą między sygnałem wejściowym a sygnałem zwrotnym. W stanie ustalonym sygnał wejściowy jest równy sygnałowi sprzężenia zwrotnego. Kierując się tym tokiem rozumowania, można ułożyć następujące równania opisujące system regulacji z zamkniętą pętlą sprzężenia zwrotnego:
(VI(s)-VO(s)H(s))G(s) = V0(s)
Po uproszczeniu równanie to przyjmuje postać:
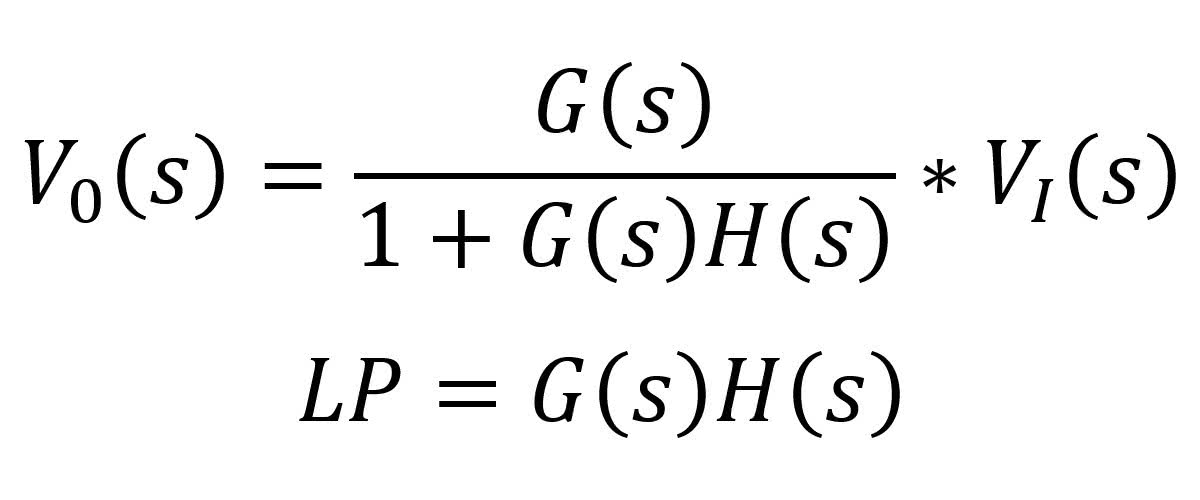
Znajdujący się w równaniu 4 człon LP jest równoważny wzmocnieniu w otwartej pętli. Zapewnia "siłę" sprzężenia zwrotnego, a więc zdolność do dokładnej regulacji wielkości, a pasmo układu jest ustalane przez parametry częstotliwościowe. Oczywiście przesunięcia fazowe w układzie i elementach pętli sprzężenia zwrotnego będą się na siebie nakładać. Jeśli całkowite wzmocnienie pętli będzie większe niż 0 dB i jednocześnie przesunięcie fazowe sięgnie 180°, nastąpi dodatnie sprzężenie zwrotne i zamiast zasilacza powstanie oscylator. Jest to kluczowe zagadnienie przy zapewnieniu stabilności. Projektant powinien upewnić się, że margines fazy i wzmocnienia znajdują się w bezpiecznym zakresie, w przeciwnym razie układ będzie się wzbudzał.
Przetwornica obniżająca DC-DC
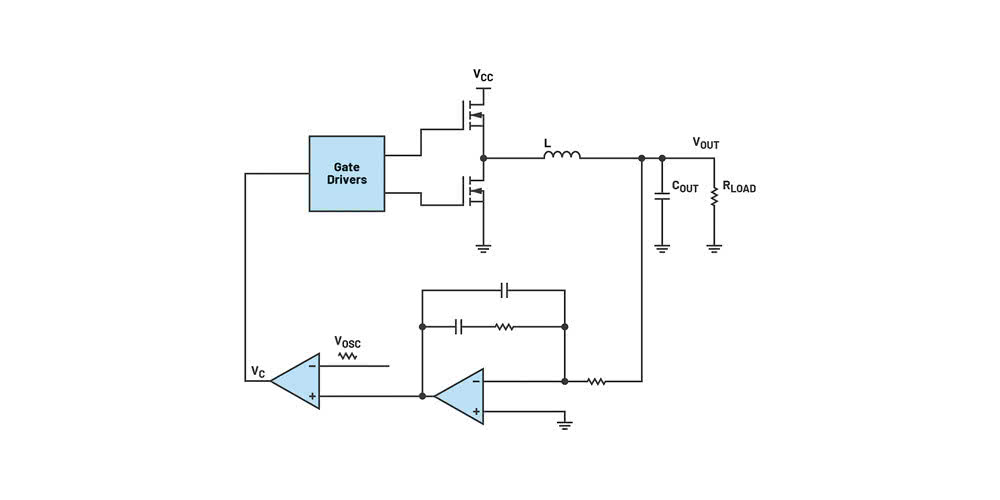
Rysunek 3 pokazuje typowy schemat blokowy konwertera DC-DC buck w wersji uproszczonej, wygodnej do analizy małosygnałowej AC. Zawiera on trzy stopnie: modulator, wyjściowy filtr LC i układ kompensacji pętli ze wzmacniaczem operacyjnym (napięcia błędu). Każdy stopień ma swoją własną transmitancję i razem tworzą one zamkniętą pętlę sterowania. Komparator i stopień półmostkowy to modulator. Źródłem sygnału wejściowego komparatora jest oscylator. Małosygnałowe wzmocnienie zmiennoprądowej modulatora jest zatem równe:
gdzie VPP jest międzyszczytowym napięciem przebiegu trójkątnego na wyjściu oscylatora, VCC to napięcie zasilające półmostkowy stopień mocy, bo teoria sterowania mówi, że dla małych sygnałów wzmocnienie układu jest równoważne transmitancji. Modulator nie wprowadza przesunięcia fazowego, a jedynie wpływa na wzmocnienie. Dla filtru LC transmitancja to:
gdzie L i C to indukcyjność i pojemność. To jest stan idealny. W rzeczywistości w obwodzie występują reaktancje pasożytnicze, jak pokazano na rysunku 4.
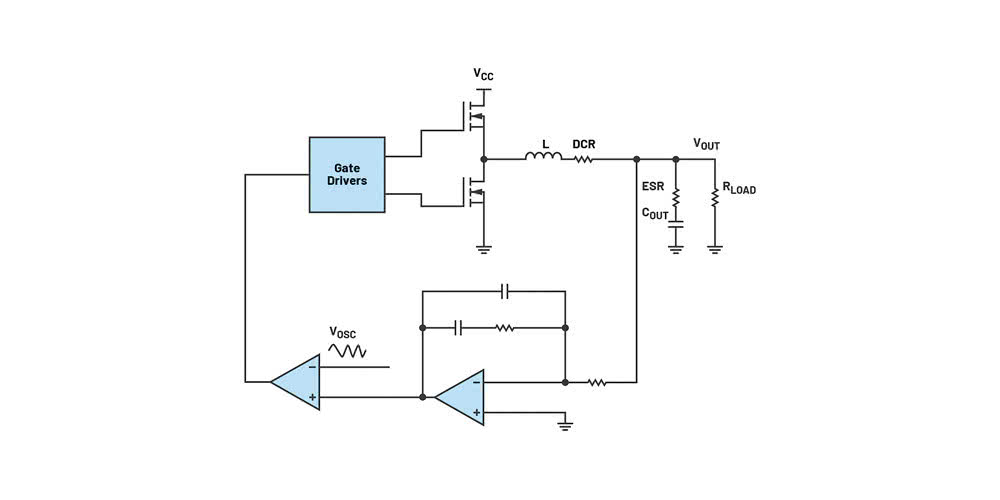
Przyjmując, że DCR to rezystancja dławika wyjściowego L dla prądu stałego, a ESR to zastępcza szeregowa rezystancja kondensatora wyjściowego C (na schemacie COUT), transmitancja filtru LC przyjmie postać:

Oczywiście na skutek istnienia ESR powstanie tzw. zero w pętli sprzężenia zwrotnego, czyli dla określonej częstotliwości licznik zależności się wyzeruje. Z kolei biegun transmitancji to taka częstotliwość, przy której mianownik pokazany powyżej się zeruje – biegun jest skutkiem istnienia DCR. Gdy ESR ma dużą wartość, projektant musi skompensować stworzone przez niego zero, aby nie pojawiły się problemy ze stabilnością. Do tego służy kompensacja pętli sprzężenia zwrotnego.
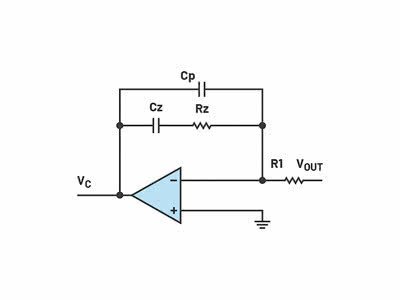

Układ kompensacji pętli sprzężenia zwrotnego typu II ma transmitancję z jednym zerem (Cz-Rz) i dwoma biegunami. Istnieją również obwody kompensacyjne typu I – z jednym biegunem (rys. 6) i typu III (rys. 7).
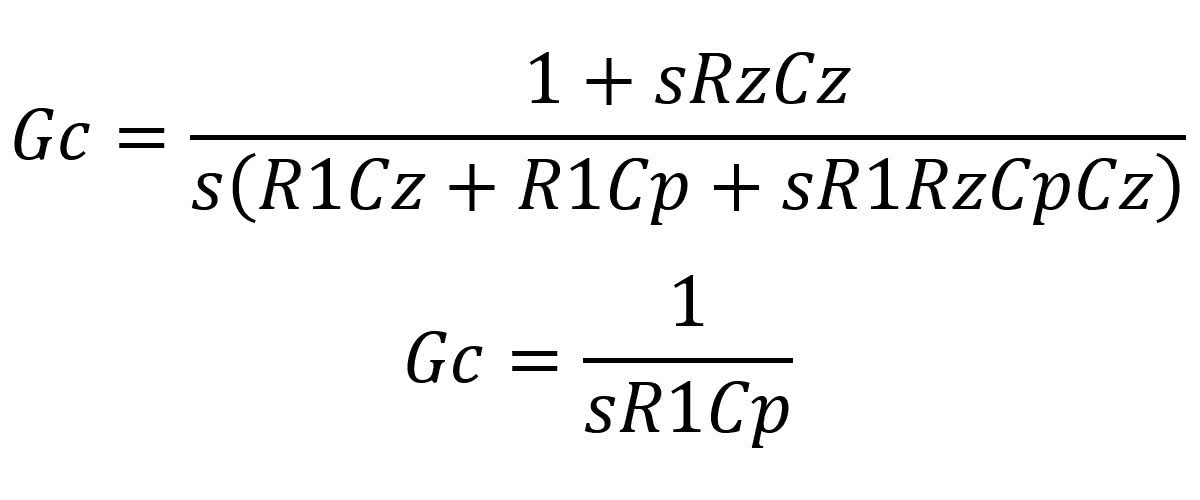
Kompensator typu I to po prostu integrator (układ całkujący), który wprowadza do transmitancji biegun, za pomocą którego kompensujemy zero pochodzące od ESR.
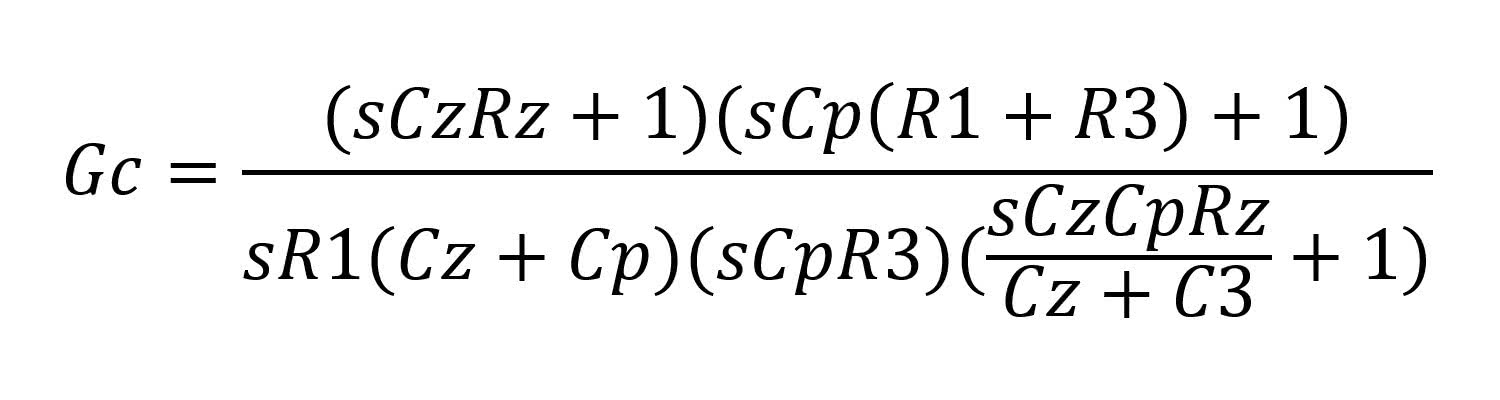
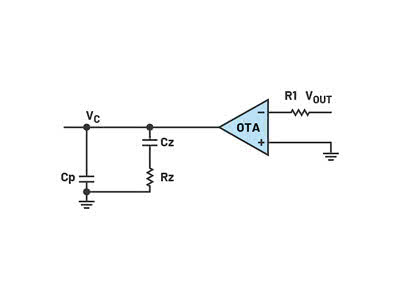
Jak widzimy, transmitancja dla typu III jest bardziej skomplikowana. Ma ona dwa zera (determinowane przez odp. człony w liczniku) i trzy bieguny (tj. człony zawarte w mianowniku transmitancji, które w pewnych warunkach się zerują; dla nich osiąga ona wartość nieskończoną, czyli biegun). Na rysunku 7 do wzmocnienia napięcia błędu użyto wzmacniacza operacyjnego. W takiej roli pracują też wzmacniacze transkonduktancyjne (OTA) o wyjściu prądowym.

Wzmacniacze OPA są podobne do zwykłych wersji operacyjnych, niemniej mają wyjście prądowe zamiast napięciowego. Napięcie błędu jest przez nie wzmacniane i zamieniane na proporcjonalny prąd, a następnie przekształcane na sygnał sterujący modulatorem przez układ kompensacji. W obu tych rozwiązaniach zera i bieguny transmitancji muszą znajdować się na odpowiedniej częstotliwości, aby nie doszło do wzbudzenia.
Jak zaprojektować pętlę sterowania?
Weźmy pod uwagę transmitancję dla otwartej pętli sprzężenia zwrotnego konwertera buck DC-to-DC z układem typu II.
Transmitancji modulatora i filtra LC nie można zmienić, więc jedyne, co zostaje, to dobrać parametry kompensacji we wzmacniaczu napięciu błędu. Dla typu II ma ona dwa bieguny i jedno zero (rys. 5):
Fz = 1/RzCz; Fp1 = 0; Fp2 = R1(Cz + Cp)/R1RzCpCz
Położenie biegunów i zer jest determinowane przez wzmocnienie i przesunięcie fazowe pętli. Biegun dodatni wprowadza nachylenie krzywej wzmocnienia na wykresie Bodego –20 dB/dekadę i dodaje przesunięcie fazowe –90° w krzywej fazy. I odwrotnie, dodatnie zero dodaje nachylenie 20 dB/dekadę wzmocnienia i 90° dla fazy. Układ kompensacji typu II ma dwa bieguny i jedno zero, a filtr LC z elementami pasożytniczymi również ma 2 bieguny i 1 zero. Te „pasożytnicze” bieguny mogą spowodować nachylenie krzywej wzmocnienia pętli w punkcie przecięcia (punkt, w którym wykres wzmocnienia w otwartej pętli przecina oś, tj. gdzie wzmocnienie wynosi 0 dB) do –40 dB/dekadę lub nawet więcej.
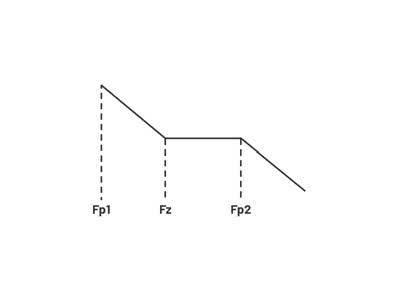
Oznacza to, że przesunięcie fazowe całego układu może osiągnąć 180° (a więc margines fazy osiągnie 0°) i konwerter się wzbudzi. Stąd projektant musi zapewnić, żeby nachylenie krzywej wzmocnienia pętli w funkcji częstotliwości wynosiło –20 dB/dekadę i dokonać tego przez parametry układu kompensacji. Zmiany Rz lub Cz wpływają na położenie zera, a modyfikacja Cp może zmienić położenie bieguna. Zwykle bieguny i zera od reaktancji pasożytniczych znajdują się w zakresie bardzo wysokich częstotliwości (bo są to małe wartości), więc w praktyce umieszcza się Fp2 nieco dalej niż Fz, aby wymusić dla nich umiejscowienie biegunów i zer poniżej 0 dB. Wówczas Fz i Fp2 determinują pasmo wynikowe pętli sprzężenia zwrotnego.
Dostosowując położenie biegunów i zer, zmieniamy charakterystykę częstotliwościową i charakterystykę fazową zamkniętej pętli i w rezultacie możemy osiągnąć równowagę między pasmem a stabilnością.

Jako przykład pokazano schemat konwertera z układem MAX25206 (rys. 10), gdzie VOUT = 5 V, ILOAD = 3,5 A, czyli RLOAD = 1,43 Ω.
Układ kompensacji typu II tworzy Cp = 0 pF (zgodnie z równaniem 8). Drugi biegun znajduje się w nieskończoności, a pierwsze zero wynikające z R5 i C2 jest przy Fz = 1/(4,7 nF × 18,2 kΩ) = 11,69 kHz. W wyjściowym filtrze LC możemy uzyskać zero z ESR i pojemności kondensatora wyjściowego (równanie 7) przy Fz = 16,4 MHz i bieguny przy Fp1 = 1,8 kHz –37,6 kHz i Fp2 = 1,8 kHz + 37,6 kHz dla komponentów ze schematu.
Jak można się spodziewać, wzmocnienie Gf osiąga najwyższą wartość przy 1,8 kHz i gwałtownie maleje dla większych częstotliwości. Kompensacja zera Fz jest faktycznie eliminacją spadku wzmocnienia pętli. Warto zauważyć, że częstotliwość rezonansowa filtru LC to 37,6 kHz. Nie powinno się umieszczać Fz zbyt blisko częstotliwości 1,8 kHz, aby wzmocnienie pętli nie przekroczyło 0 dB przy 37,6 kHz. Wyniki symulacji małosygnałowej pokazano na rysunku 11.

Typ III kompensacji może zapewnić większe pasmo i stabilność pętli sprzężenia zwrotnego. Niemniej, aby dobrać w tym przypadku elementy kompensacji, nie tylko trzeba użyć transmitancji w pętli otwartej i wykresu Bodego, ale również przyjrzeć się, czy bieguny transmitancji pętli zamkniętej znajduje się w lewej połowie układu współrzędnych (jest to znane kryterium stabilności). Nie jest to łatwe, więc w praktyce analiza transmitancji dla pętli otwartej na wykresie Bodego jest najprostszą metodą uzyskania stabilnego zasilacza.
W przypadku innych topologii konwerterów pętle i metody kompensacji oraz teoria stabilności są takie same, jedyną różnicą jest inna funkcja modulatora, który determinuje wzmocnienie pętli.
Przykłady innych rozwiązań obwodów kompensacji
Oprócz różnych topologii konwersji DC-DC istnieją również różne pętle sterowania. Przykładem może być MAX20090 – kontroler LED, który realizuje pętlę sterowania stałym prądem wyjściowym. Innym przykładem jest regulator buck MAX25206 z funkcją ograniczenia prądu szczytowego lub średniego. Reguluje on zarówno napięcie wyjściowe, jak i prąd – jest to tzw. podwójny kontroler działający w pętli zamkniętej. Zwykle pętla regulacji prądu znajduje się w pętli wewnętrznej, a pętla regulacji napięcia w pętli zewnętrznej. Szerokość pasma pętli prądowej (czyli szybkość odpowiedzi) jest większa niż pętli napięciowej, dzięki czemu można osiągnąć ograniczenie prądu, które nie stwarza niebezpieczeństwa uszkodzenia. Trzecim przykładem jest regulator temperatury MAX1978. Zawiera on mostek H, który zasila element Peltiera (TEC), a kierunek płynącego prądu określa tryb ogrzewania lub chłodzenia. Sygnał błędu to temperatura elementu termoelektrycznego. Taka pętla sterowania stabilizuje temperaturę TEC na oczekiwanej wartości.
Yaxian Li, Analog Devices
Arrow Electronics Poland
tel. 22 558 82 66
www.arrow.com










