Źródła częstotliwości taktowania dzieli się zasadniczo na dwie grupy: z rezonansem mechanicznym - tzn. rezonatory ceramiczne i kwarcowe oraz z rezonansem elektrycznym, do której zaliczane są rezonatory LRC (rys. 1). Wady i zalety komponentów obu rodzajów stanowią wstępne kryterium wyboru generatora częstotliwości dla danej aplikacji (tabela 1). Będące głównym tematem tego artykułu rezonatory mechaniczne, a zwłaszcza kwarcowe, charakteryzuje np. duża początkowa dokładność. Rezonatory te między sobą mogą się natomiast różnić pod względem poboru mocy.
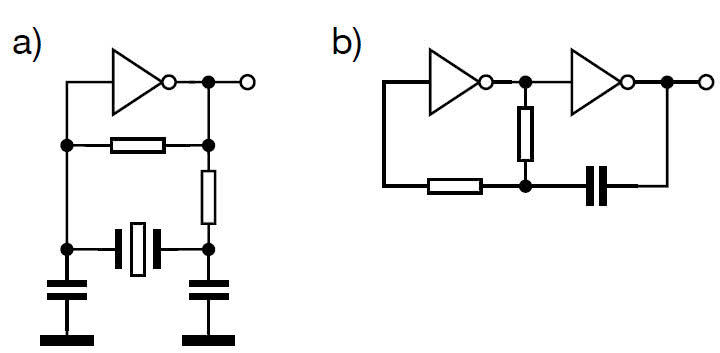
Rys. 1. Źródła częstotliwości taktowania dzielimy na elementy z rezonansem mechanicznym i elektrycznym. Na „a” przykład oscylatora z rezonatorem kwarcowym w konfiguracji Pierce’a oraz na „b” oscylatora RC |
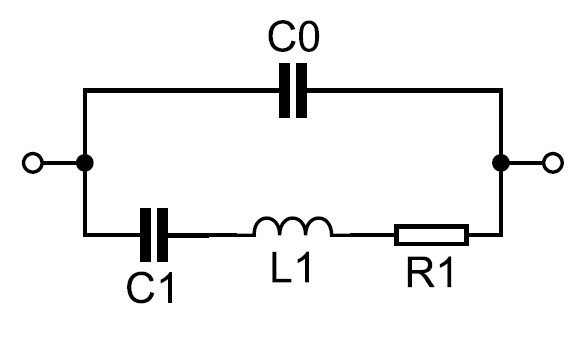
Rys. 2. Zastępczy schemat rezonatora kwarcowego z uwzględnieniem pojemności elektrod oraz przewodów łączących, reprezentowanych przez kondensator C0. Wartości pozostałych elementów zależą od parametrów mechanicznych płytki rezonatora (C1, L1) oraz tłumienia drgań (R1) |
Rezonatory ceramiczne pobierają zwykle większy prąd niż kwarcowe oraz ceny i miejsca zajmowanego na płytce - pod tymi względami atrakcyjniejszym rozwiązaniem są rezonatory ceramiczne. Oscylatory z rezonansem elektrycznym z kolei są znacznie tańsze, ale jednocześnie nie gwarantują dużej dokładności, która na dodatek w większym stopniu niż u konkurencyjnych komponentów z rezonansem mechanicznym zależy od wahań temperatury oraz napięcia zasilania. Błąd częstotliwości może tu sięgać 5-50% nominalnej częstotliwości rezonansowej.
Rezonatory kwarcowe
Komponenty kwarcowe, które włączone w pętlę sprzężenia zwrotnego wzmacniacza operacyjnego (rys. 1) pełnią rolę obwodu rezonansowego (rys. 2) i ciągle są jednym z najpopularniejszych źródeł częstotliwości wzorcowej. Ich głównym elementem jest płytka wycięta z kryształu SiO2 (rys. 3). Na skutek wibracji kryształu generowany jest sygnał o określonej częstotliwości podstawowej lub jej harmonicznych.
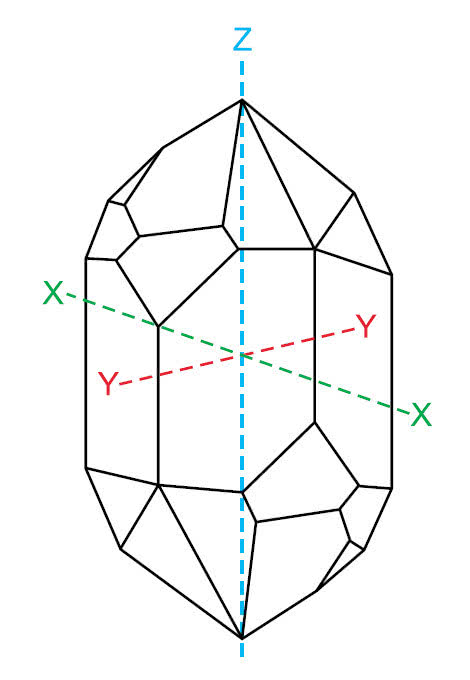
Rys. 3. Kryształ kwarcu |
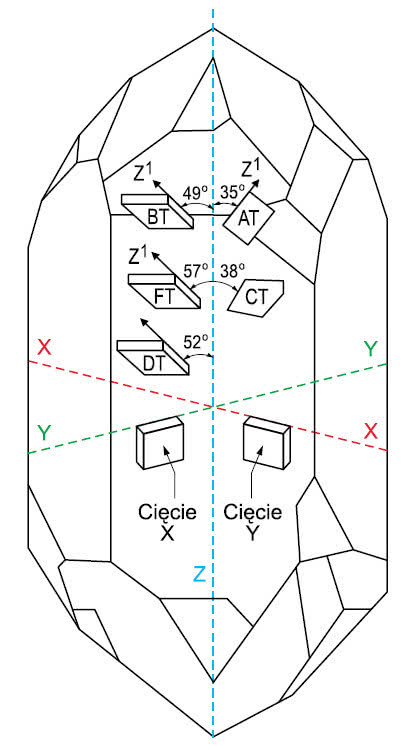
Rys. 4. Aby uzyskać odpowiednie właściwości temperaturowe oraz elektryczno-mechaniczne płytkę wycina się z kryształu kwarcu wykonując kombinację cięć wzdłuż osi X, Y i Z, określanych jako np. cięcia AT, BT lub CT |
Szereg czynników wpływa na stabilność częstotliwości tego przebiegu, jak i na możliwość generacji sygnałów o częstotliwościach nieharmonicznych. Oprócz tego, że zakłócają one właściwy sygnał w momencie, gdy kryształ zaczyna drgać w niepożądany sposób wibracje te mogą się nawzajem znosić. W określonych warunkach otoczenia, które np. wzmocnią niepożądane wibracje rezonator może wtedy nawet nagle przestać działać.
Wymaganą częstotliwość drgań rezonatora uzyskuje się przycinając krawędzie kryształu pod odpowiednim kątem do jego poszczególnych osi. Wybór osi oraz kąta determinuje fizyczne oraz elektryczne właściwości rezonatora - na przykład płytka wycięta z kryształu w płaszczyźnie osi Y charakteryzować się będzie dodatnim współczynnikiem temperaturowym. Płytki wycina się też wykonując kombinację cięć pod różnymi kątami względem osi X, Y i Z kryształu. Ich poszczególne typy rozróżnia się wprowadzając odpowiednie nazewnictwo, w tym np. cięcia BT, CT, DT lub FT (rys. 4).
Jednym z częściej wykonywanych jest cięcie AT, tzn. pod kątem 35º do osi Y. Wadą płytek produkowanych w ten sposób jest duża wrażliwość na zmiany temperatury. Innym, równie popularnym cięciem jest SC. Płytki kwarcowe wytwarzane w ten sposób są wprawdzie nieco droższe niż te z cięcia AT, ale jednocześnie charakteryzuje je duża stabilność temperaturowa. Dzięki temu są one chętniej wykorzystywane do budowy oscylatorów o większej dokładności.
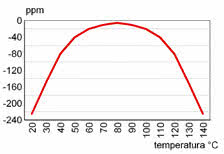 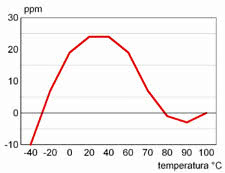 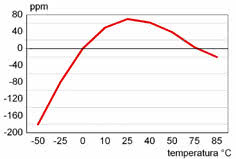
Rys. 5–7. Stabilność częstotliwości w dużej mierze zależy od sposobu wycięcia płytki kryształu kwarcu. Na wykresach przedstawiono charakterystyki zmian częstotliwości w funkcji temperatury dla płytek o cięciu BT (rys. 5.), DT (rys. 6.) oraz CT (rys. 7.) |
Mimo możliwości wpływania ma elektryczno-mechaniczne właściwości płytek kwarcowych przez odpowiednie kształtowanie struktury kwarcu niektórych problemów nie da się w ten sposób całkowicie rozwiązać. Rezonatory kwarcowe wykazują bowiem tendencję do zmiany częstotliwości rezonansowej m.in. na skutek starzenia się, jak i w wyniku zmiany warunków otoczenia takich jak np. temperatura, wilgotność, wibracje i wstrząsy.
Wpływ temperatury, zmiany starzeniowe
Największy wpływ na stabilność rezonatora kwarcowego mają zmiany temperatury. Odchylenia częstotliwości jego drgań od częstotliwości początkowej spowodowane fluktuacjami temperatury mogą sięgać nawet kilkuset ppm. Wiele zależy od sposobu wycięcia płytki kwarcu, co na przykładzie cięć typu BT, DT i CT ilustrują rysunki 5, 6 i 7. W niektórych przypadkach zmiana częstotliwości jest nieznaczna, a charakterystyka ma przebieg prawie płaski. W innych z kolei w pewnym przedziale temperatur obserwować można nagły i duży wzrost błędu częstotliwości.
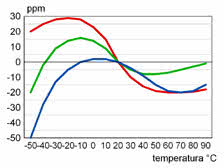
Rys. 8. Nawet niewielka zmiana kąta cięcia może znacząco wpłynąć na temperaturową stabilność częstotliwości rezonatora. Na wykresie charakterystyki płytek kwarcowych wykonanych z cięcia AT przy zmianie kąta o kilka sekund kątowych |
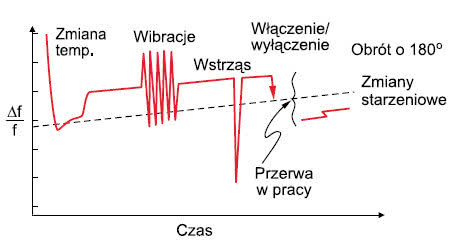
Rys. 9. Na stabilność częstotliwości drgań kwarcu wpływa szereg czynników, m.in. starzenie się kwarcu oraz wstrząsy i wibracje |
Co więcej nawet niewielka zmiana kąta cięcia może znacząco wpłynąć na stabilność temperaturową rezonatora, co dla cięcia AT zilustrowano na rys. 8. Ponieważ nie można całkowicie uniknąć zmiany częstotliwości rezonansowej, zwłaszcza jeżeli rezonator pracuje w szerokim zakresie temperatur, by minimalizować związane z tym problemy wykorzystuje się różne metody kompensacji. Problemem jest też starzenie się kwarcu.
Naprężenia, jakim podlega płytka drgająca, a także zanieczyszczenia np. pozostawione na powierzchni płytki w czasie produkcji powodują, że zmienia się m.in. jej współczynnik sprężystości. Przeważnie kryształ rezonatora najszybciej starzeje się w pierwszym roku pracy, gdy jego dokładność spada o około 5 ppm. W kolejnych latach jest to już raczej stały spadek, rzędu od 1 do 3 ppm rocznie. Na stabilność częstotliwości rezonatora mają wpływ też wibracje, wstrząsy oraz przyciąganie ziemskie.
Naprężenia będące skutkiem tego ostatniego czynnika wpływają na częstotliwość rezonatora w zależności od jego orientacji. Oznacza to, że rezonator skalibrowany w jednej pozycji przy jej zmianie będzie miał już inną częstotliwość drgań. Typowy rząd wielkości błędu częstotliwości przy obrocie o 180º to 0,001 ppm. Wstrząsy oraz wibracje, czyli zazwyczaj słabsze, ale za to dłużej trwające oddziaływania także są przyczyną dodatkowych naprężeń, które działając na płytkę rezonatora skutkują zmianą częstotliwości rzędu 0,001 ppm przy wstrząsie o sile 1G.
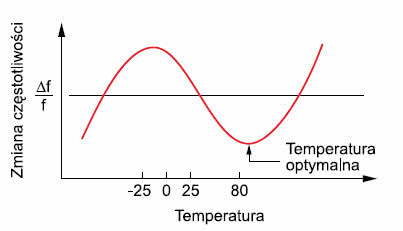
Rys. 10. Optymalną temperaturę pracy wybiera się na podstawie temperaturowej charakterystyki błędu częstotliwości kwarcu |
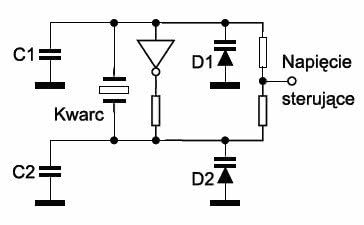
Rys. 11. VCXO to oscylator kwarcowy uzupełniony o elementy o regulowanej reaktancji |
W przypadku rezonatorów kwarcowych zaobserwować można jeszcze jedno niekorzystne zjawisko. Polega ono na tym, że częstotliwość oscylatora włączonego pod dłuższej przerwie może się zmienić. Błąd częstotliwości tym spowodowany jest zazwyczaj rzędu 0,01 ppm. Wpływ wszystkich wymienionych czynników na stabilność częstotliwości rezonatorów kwarcowych zobrazowano na rys. 9.
OXCO, VCXO, TCXO
Istnieje kilka sposobów kompensacji wpływu temperatury na stabilność częstotliwości rezonansowej kwarcu. Jednym z rozwiązań jest kontrola oraz stabilizacja temperatury pracy rezonatora. Optymalną wartość temperatury wyznacza się na podstawie temperaturowej charakterystyki błędu częstotliwości rezonatora, wybierając wartość odpowiadającą minimalnej zmianie częstotliwości (rys. 10). Najlepsze rezultaty osiąga się, gdy temperaturę pracy ustala się na od 15 do 20° powyżej maksymalnej przewidywanej temperatury otoczenia, w jakiej pracować będzie oscylator.
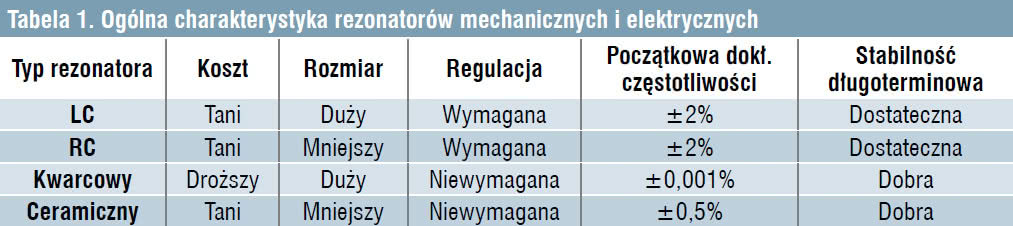
Tabela 1. Ogólna charakterystyka rezonatorów mechanicznych i elektrycznych |
Takie oscylatory określa się skrótem OCXO (Oven Controlled Crystal Oscillators). Drugim popularnym rozwiązaniem w zakresie kompensacji wpływu zmian temperatury na stabilność rezonatora kwarcowego są tzw. układy TCXO (Temperature Compensated Oscillator). Wykorzystuje się w nich dwa główne komponenty: czujnik temperatury oraz blok tzw. VCXO (Voltage Controlled Crystal Oscillator), czyli oscylatora kwarcowego uzupełnionego o element o regulowanej reaktancji (rys. 11).
Zmieniając jego pojemność można wpływać na wartość częstotliwości rezonansowej oscylatora. W tym celu wykorzystuje się najczęściej diodę pojemnościową, a jako sygnał sterujący jej pojemnością - napięcie. Na rys. 12 przedstawiono schemat blokowy zegara RTC DS3231 firmy Maxim z magistralą I²C, częścią którego jest oscylator TCXO 32 kHz. Jego dokładność producent oszacował na ±2 ppm w zakresie temperatur od 0 do +40ºC oraz ±3,5 ppm w zakresie od -40 do +85ºC.
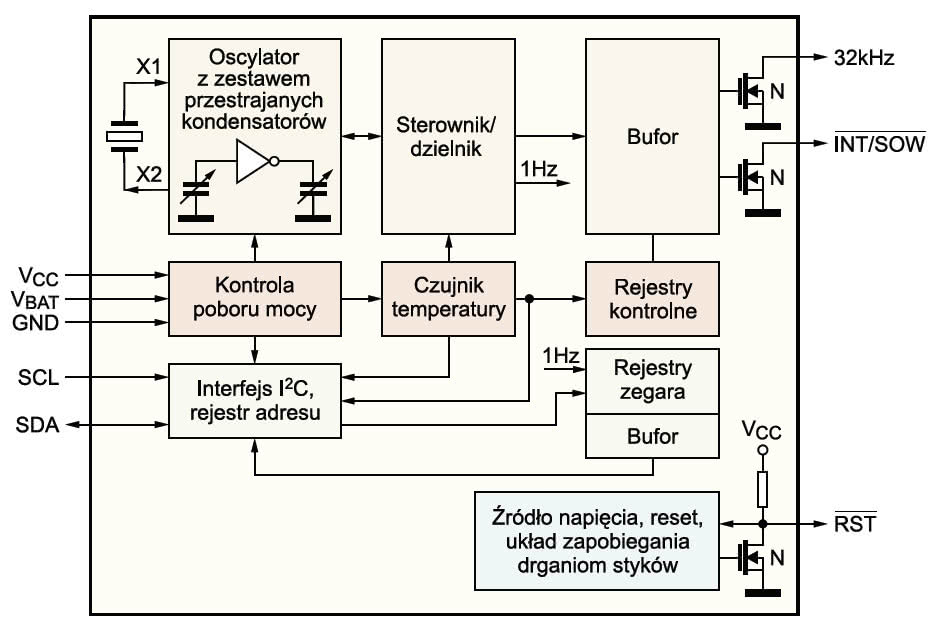
Rys. 12. Schemat blokowy układu DS3231 firmy Maxim |
Jak wynika z rys. 12 blok TCXO układu DS3231 składa się czujnika temperatury, układu oscylatora z zestawem przestrajanych kondensatorów oraz sterownika, który na podstawie zmierzonej temperatury z zapisanej w pamięci tablicy odczytuje odpowiadającą jej wartość pojemności. Dodatkowo uwzględniane są dane z rejestru kompensacji wpływu starzenia się kwarcu. Na tej podstawie ustalana jest wartość zapisywana następnie do rejestru wyboru kondensatorów. Częstotliwość rezonatora jest korygowana w momencie nagłej zmiany temperatury lub może ją zainicjować użytkownik.
Pętla fazowa
Oprócz TCXO oscylatory VCXO są też częścią układów z pętlą fazową (PLL). Ich zadaniem jest powielanie częstotliwości podstawowej drgań rezonatora w kilku określonych przedziałach. Sygnały taktujące generowane w ten sposób z jednego źródła, np. rezonatora kwarcowego o częstotliwości kilku MHz, doprowadza się do poszczególnych części systemu. Pętlę fazową zrealizować można na kilka sposobów. Jednym z nich jest skorzystanie z oddzielnych elementów. Wówczas oprócz VCXO częścią PLL są także: detektor fazy oraz filtr. Można też znaleźć gotowe układy łączące w sobie wszystkie wymagane elementy.
Rozwiązaniem pośrednim jest wykorzystanie układu ASIC lub FPGA, częścią którego jest detektor fazy i pompa ładunkowa, a często też dzielnik częstotliwości. Taką częściowo zintegrowaną pętlę fazową uzupełnić należy o zewnętrzny VCXO oraz odpowiednio dobrany filtr (rys. 13). Pętla fazowa nie we wszystkich aplikacjach jest rozwiązaniem optymalnym. Często na przeszkodzie w jej realizacji staje kwestia zwiększenia kosztów, dodatkowego poboru mocy lub pogorszenia precyzji sygnału taktującego, charakteryzowanej głównie za pomocą dwóch parametrów: szumu fazowego oraz jittera.
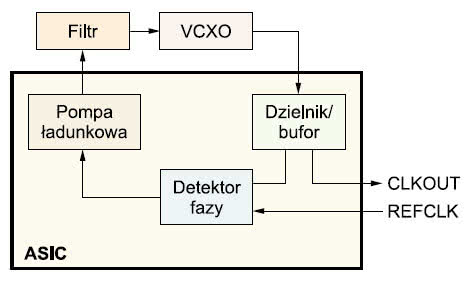
Rys. 13. PLL może być częściowo zintegrowana w ramach układu ASIC lub FPGA |
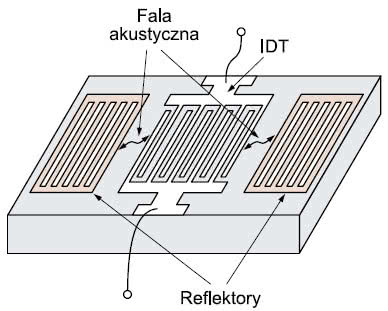
Rys. 14. Rezonator SAW |
W idealnym przypadku sinusoidalnego generatora częstotliwości taktowania cała moc sygnału powinna skupiać się na jednej częstotliwości. W praktyce jednak w takim sygnale wyodrębnić można szum, który rozprasza moc sygnału na inne częstotliwości, co skutkuje pojawieniem się wstęg bocznych w jego widmie. Do scharakteryzowania jakości sygnału taktującego w dziedzinie częstotliwości wykorzystuje się wspomniany szum fazowy, wyrażany zazwyczaj w dBc/Hz.
Parametr ten określa stosunek mocy sygnału o częstotliwości oddalonej o określony odstęp od częstotliwości rezonansowej oscylatora, do mocy sygnału o tej częstotliwości. Jitter z kolei jest wyznacznikiem jakości sygnału taktującego w dziedzinie czasu. Zazwyczaj wyraża się go w pikosekundach. Charakteryzuje on zmiany okresu sygnału taktującego w odniesieniu do przebiegu idealnego. W aplikacjach z układami ADC większy szum fazowy powoduje pogorszenie stosunku sygnału do szumu oraz zmniejszenie efektywnej liczby bitów, a tym samym rozdzielczości przetwornika.
Z kolei pogorszenie jitteru sygnału zegara ma szczególne znaczenie w transmisji danych z dużą prędkością, np. rzędu gigabitów, tzn. m.in. w komunikacji sieciowej oraz w przesyłaniu sygnału wideo dużej rozdzielczości. W aplikacjach tego typu sygnał zegara ze zbyt dużym jitterem skutkuje wzrostem współczynnika błędnych bitów (BER). Niestety, gdy częstotliwość z rezonatora jest zwielokrotniana z wykorzystaniem PLL szum fazowy sygnału wyjściowego rośnie, dokładnie o +20logM, gdzie M to mnożnik w danej pętli fazowej.
  |
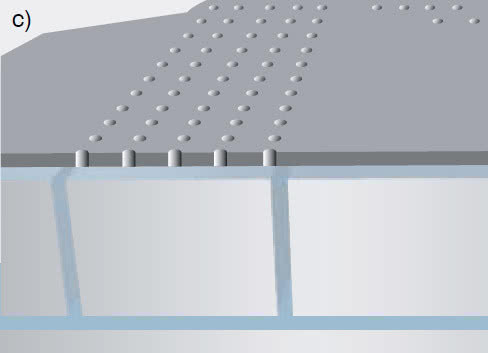 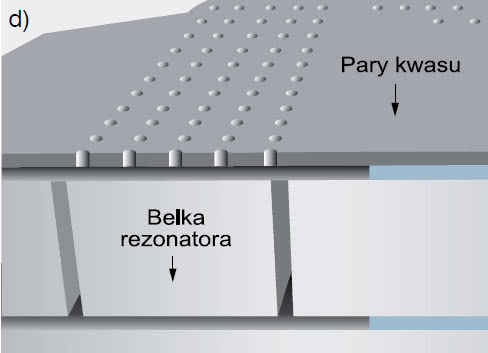 |
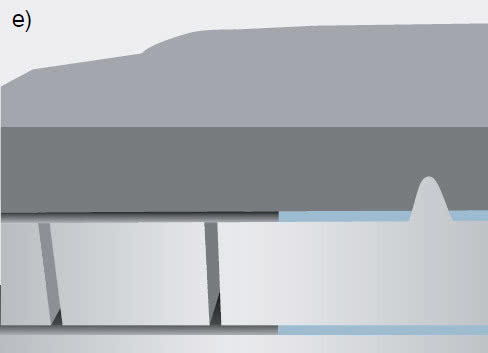 
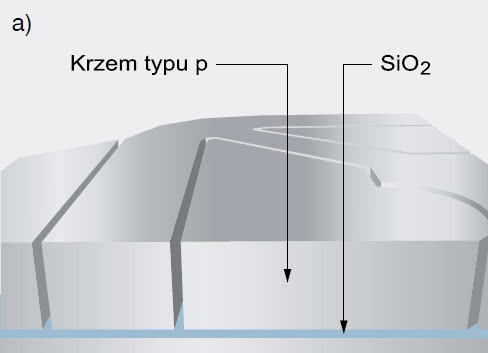
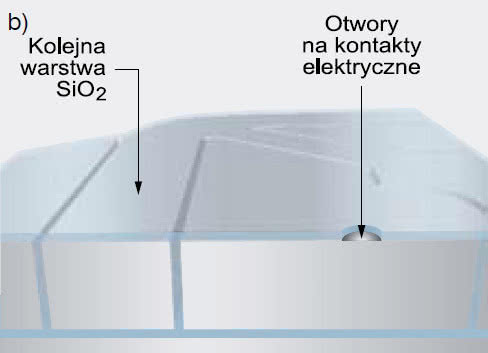
Rys. 15. Kolejne etapy produkcji rezonatora MEMSi |
PLL wpływa też na jitter przebiegu taktującego. Dominujący wpływ na jakość sygnału mają głównie szumy poszczególnych komponentów pętli, w tym filtrów oraz wzmacniacza oscylatora, jak również zakłócenia napięcia zasilającego oraz zakłócenia zewnętrzne. Newralgicznym punktem dla przenoszenia szumów na wyjście zegara jest połączenie filtru PLL z VCXO. Szumy, które tą drogą przenikną do pętli fazowej i pojawią się na wejściu VCXO zostaną wzmocnione. Problem ten staje się szczególnie dokuczliwy w przypadku częściowo zintegrowanych rozwiązań, w których elementem zewnętrznym są właśnie filtry.
Rezonatory ceramiczne i SAW
Gdy wymagania odnośnie dokładności schodzą na dalszy plan, a najważniejsze stają się takie kwestie jak np. koszt, miejsce zajmowane na płytce, czy mechaniczna wytrzymałość alternatywą dla kwarcu stają się np. rezonatory ceramiczne. Często wykorzystuje się je m.in. jako zegary w mikrokontrolerach. Rezonatory tego typu budowane są na bazie ferroelektrycznego materiału ceramicznego, na wierzchu i spodzie którego umieszcza się dwie elektrody.
Rys. 16. Wybierając źródło częstotliwości do danej aplikacji warto kierować się jej wymaganiami |
Alternatywą dla tradycyjnych rezonatorów kwarcowych są też oscylatory produkowane w technologii SAW (Surface Acoustic Wave) wykorzystującej propagację powierzchniowej fali akustycznej. Rezonatory tego typu składają się zazwyczaj z przetwornika palczastego (Inter Digital Transducer, IDT) oraz dwóch reflektorów, które odbijają falę akustyczną. W ten sposób powstaje między nimi fala stojąca (rys. 14). IDT oraz reflektory wytwarzane są w podłożu z kwarcu w procesie fotolitografii. Podobnie jak w przypadku "zwykłych" rezonatorów kwarcowych bardzo ważny jest kąt cięcia płytki. Całość umieszczana jest w ceramicznej obudowie.
Rezonatory SAW znajdują zastosowanie np. w urządzeniach do zdalnego sterowania. Ich zaletą w porównaniu np. do wcześniej omawianych oscylatorów kwarcowych i ceramicznych jest szerszy zakres częstotliwości, od 50 MHz do około 1 GHz. Pod względem odporności na wahania temperatury oraz początkowej dokładności parametry rezonatorów SAW plasują się między rezonatorami kwarcowymi, a oscylatorami LRC.
Rezonatory MEMS
 Konkurencją dla rezonatorów kwarcowych są też niedawno wprowadzone oscylatory MEMS. Jednym z dostawców komponentów tego typu jest firma SiTime, produkująca je w ramach procesu MEMS First. Hermetyczność w przypadku tej technologii zapewniono zamykając płytki rezonatorów w mikrokomorach próżniowych. Gotowe układy MEMS są następnie pakowane z wykorzystaniem metod standardowo stosowanych w produkcji innych układów scalonych.
Konkurencją dla rezonatorów kwarcowych są też niedawno wprowadzone oscylatory MEMS. Jednym z dostawców komponentów tego typu jest firma SiTime, produkująca je w ramach procesu MEMS First. Hermetyczność w przypadku tej technologii zapewniono zamykając płytki rezonatorów w mikrokomorach próżniowych. Gotowe układy MEMS są następnie pakowane z wykorzystaniem metod standardowo stosowanych w produkcji innych układów scalonych.
Materiałem bazowym układów SiTime jest płytka SOI (Silicon On Insulator), w której w procesie wytrawiania DRIE (Deep Reactive Ion Etching) formowana jest struktura rezonatora (rys. 15a). Następnie wszystkie zagłębienia wypełniane są tlenkiem krzemu. W jego górnej warstwie wytrawiane są otwory na kontakty elektryczne (rys. 15b). Przygotowaną w ten sposób płytkę pokrywa się od góry warstwą krzemu.
Następnie wycina się w niej kilka rzędów niewielkich otworów (rys. 15c). Tą drogą usuwany jest tlenek krzemu wypełniający przestrzeń między belkami rezonatora. Realizuje się to wprowadzając do otworów pary kwasu fluorowodorowego. Ten etap jest bardzo istotny, gdyż wówczas ustala się objętość komory, w której pracować będzie rezonator. Tlenek nie jest usuwany jedynie z miejsc, w których rezonator i elektrody łączą się z podłożem (rys. 15d).
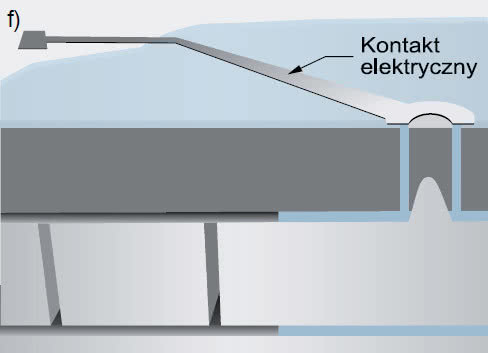
Kolejny krok to tzw. proces Epi-Seal. Polega on na oczyszczeniu komory rezonatora gorącymi gazami (wodorem i chlorem) oraz uszczelnieniu otworów polikrzemem (rys. 15e). Realizuje się to w bardzo wysokiej temperaturze w reaktorze epitaksjalnym. W ten sposób w komorze uzyskuje się próżnię. Precyzja, z jaką udaje się przeprowadzić proces Epi-Seal ma decydujący wpływ na stabilność częstotliwości generowanej przez rezonator przez cały okres jego pracy. Ostatnim etapem jest utworzenie połączeń elektrycznych oraz naniesienie aluminiowych kontaktów (rys. 15f).
Optymalne źródło częstotliwości
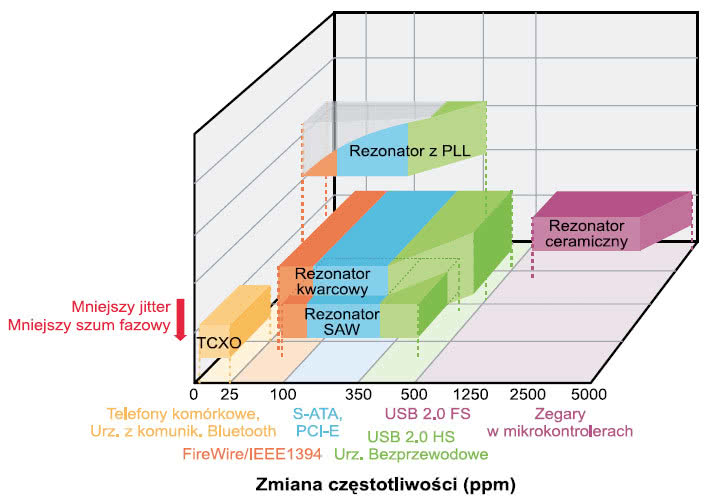
Na rys. 16 poszczególne typy źródeł częstotliwości taktowania przydzielono konkretnym urządzeniom lub grupom urządzeń, kierując się przede wszystkim ich wymaganiami pod względem dokładności rezonatora. Jest to jedynie przykładowy podział, ponieważ trudno jednoznacznie przypisać dany typ rezonatora do konkretnej grupy aplikacji. Na przykład nie jest regułą, że rezonatory ceramiczne należy wykorzystywać w aplikacjach USB 2.0, a w telefonach komórkowych dominować powinny rezonatory TCXO.
Dotyczy to wszystkich rodzajów rezonatorów omówionych w artykule, także rezonatorów kwarcowych, które z kolei często uważane są za rozwiązanie uniwersalne. Wprawdzie jak na razie nic nie zapowiada, by jakiekolwiek inne źródło częstotliwości całkowicie wyparło je z rynku, ale warto mieć świadomość ich ograniczeń oraz znać właściwości dostępnych komponentów alternatywnych.
Monika Jaworowska










